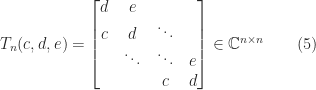
A tridiagonal matrix is a square matrix whose elements are zero away from the main diagonal, the subdiagonal, and the superdiagonal. In other words, it is a banded matrix with upper and lower bandwidths both equal to 

An important example is the matrix 

![\notag T_5 = \left[ \begin{array}{@{}*{4}{r@{\mskip10mu}}r} 4 & -1 & & & \\ -1 & 4 & -1 & & \\ & -1 & 4 & -1 & \\ & & -1 & 4 & -1 \\ & & & -1 & 4 \end{array}\right].](https://s0.wp.com/latex.php?latex=%5Cnotag++++T_5+%3D+%5Cleft%5B++++%5Cbegin%7Barray%7D%7B%40%7B%7D%2A%7B4%7D%7Br%40%7B%5Cmskip10mu%7D%7Dr%7D+++++++++++++++++4++%26+-1+%26++++%26++++%26++++%5C%5C+++++++++++++++++-1+%26+4++%26+-1+%26++++%26++++%5C%5C++++++++++++++++++++%26+-1+%26+4++%26+-1+%26++++%5C%5C++++++++++++++++++++%26++++%26+-1+%26+4++%26+-1+%5C%5C++++++++++++++++++++%26++++%26++++%26+-1+%26+4++++%5Cend%7Barray%7D%5Cright%5D.+&bg=ffffff&fg=222222&s=0&c=20201002)
It is symmetric positive definite, diagonally dominant, a Toeplitz matrix, and an 
Tridiagonal matrices have many special properties and various algorithms exist that exploit their structure.
Symmetrization
It can be useful to symmetrize a matrix by transforming it with a diagonal matrix. The next result shows when symmetrization is possible by similarity.
Theorem 1. If
is tridiagonal and
for all
then there exists a diagonal
with positive diagonal elements such that
is symmetric, with
element
.
Proof. Let
. Equating
and
or
As long as
and solve (2) to obtain real, positive
,
. The formula for the off-diagonal elements of the symmetrized matrix follows from (1) and (2).


LU Factorization
The LU factors of a tridiagonal matrix are bidiagonal:

The equation 

The recurrence breaks down with division by zero if one of the leading principal submatrices 






For a tridiagonal Toeplitz matrix
the elements of the LU factors converge as 

Theorem 2. Suppose that
has an LU factorization with LU factors (3) and that
and
. Then
decreases monotonically and

From (4), it follows that under the conditions of Theorem 2, 





Inverse
The inverse of a tridiagonal matrix is full, in general. For example,
![\notag T_5(-1,3,-1)^{-1} = \left[\begin{array}{rrrrr} 3 & -1 & 0 & 0 & 0\\ -1 & 3 & -1 & 0 & 0\\ 0 & -1 & 3 & -1 & 0\\ 0 & 0 & -1 & 3 & -1\\ 0 & 0 & 0 & -1 & 3 \end{array}\right]^{-1} = \frac{1}{144} \left[\begin{array}{ccccc} 55 & 21 & 8 & 3 & 1 \\ 21 & 63 & 24 & 9 & 3 \\ 8 & 24 & 64 & 24 & 8 \\ 3 & 9 & 24 & 63 & 21\\ 1 & 3 & 8 & 21 & 55 \end{array}\right].](https://s0.wp.com/latex.php?latex=%5Cnotag+++T_5%28-1%2C3%2C-1%29%5E%7B-1%7D+++%3D+%5Cleft%5B%5Cbegin%7Barray%7D%7Brrrrr%7D+3+%26+-1+%26+0+%26+0+%26+0%5C%5C+++++++++++++++++++++++++++++++-1+%26+3+%26+-1+%26+0+%26+0%5C%5C+++++++++++++++++++++++++++++++0+%26+-1+%26+3+%26+-1+%26+0%5C%5C+++++++++++++++++++++++++++++++0+%26+0+%26+-1+%26+3+%26+-1%5C%5C+++++++++++++++++++++++++++++++0+%26+0+%26+0+%26+-1+%26+3+%5Cend%7Barray%7D%5Cright%5D%5E%7B-1%7D++%3D++%5Cfrac%7B1%7D%7B144%7D+++++%5Cleft%5B%5Cbegin%7Barray%7D%7Bccccc%7D+55+%26+21+%26+8++%26+3++%26+1+%5C%5C++++++++++++++++++++++++++++++++21+%26+63+%26+24+%26+9++%26+3+%5C%5C++++++++++++++++++++++++++++++++8+%26+24+%26+64+%26+24+%26+8+%5C%5C+3+%26+9+%26+24+%26+63+%26+21%5C%5C++++++++++++++++++++++++++++++++1+%26+3++%26+8++%26+21+%26+55+%5Cend%7Barray%7D%5Cright%5D.+&bg=ffffff&fg=222222&s=0&c=20201002)
Since an 






Theorem 3. If
is tridiagonal, nonsingular, and irreducible then there are vectors
,
,
, and
, all of whose elements are nonzero, such that
![\notag (A^{-1})_{ij} = \begin{cases} u_iv_j, & i\le j,\\ x_iy_j, & i\ge j.\\[4pt] \end{cases}](https://s0.wp.com/latex.php?latex=%5Cnotag+++++++++++%28A%5E%7B-1%7D%29_%7Bij%7D+%3D+%5Cbegin%7Bcases%7D+++++++++++++++++++++++++++++++++u_iv_j%2C+%26+i%5Cle+j%2C%5C%5C+++++++++++++++++++++++++++++++++x_iy_j%2C+%26+i%5Cge+j.%5C%5C%5B4pt%5D+++++++++++++++++++++++++++%5Cend%7Bcases%7D+&bg=ffffff&fg=222222&s=0&c=20201002)
The theorem says that the upper triangle of the inverse agrees with the upper triangle of a rank-

If a tridiagonal matrix 

where 

in which the 

The inverse of the Toeplitz tridiagonal matrix 
Eigenvalues
The most widely used methods for finding eigenvalues and eigenvectors of Hermitian matrices reduce the matrix to tridiagonal form by a finite sequence of unitary similarity transformations and then solve the tridiagonal eigenvalue problem. Tridiagonal eigenvalue problems also arise directly, for example in connection with orthogonal polynomials and special functions.
The eigenvalues of the Toeplitz tridiagonal matrix

The eigenvalues are also known for certain variations of the symmetric matrix 


Some special results hold for the eigenvalues of general tridiagonal matrices. A matrix is derogatory if an eigenvalue appears in more than one Jordan block in the Jordan canonical form, and nonderogatory otherwise.
Theorem 4. If
Proof. Let
, for any
. The matrix
is lower triangular with nonzero diagonal elements
and hence it is nonsingular. Therefore
has rank at least
for all
when
Corollary 5. If
Proof. By Theorem 1 the eigenvalues of
and so are real. The matrix
is tridiagonal and irreducible so it is nonderogatory by Theorem 4, which means that its eigenvalues are simple because it is symmetric.
The formula (6) confirms the conclusion of Corollary 5 for tridiagonal Toeplitz matrices.
Corollary 5 guarantees that the eigenvalues are distinct but not that they are well separated. The spacing of the eigenvalues in (6) clearly reduces as 


For example,
![\notag W_5^+ = \left[\begin{array}{ccccc} 2 & 1 & 0 & 0 & 0\\ 1 & 1 & 1 & 0 & 0\\ 0 & 1 & 0 & 1 & 0\\ 0 & 0 & 1 & 1 & 1\\ 0 & 0 & 0 & 1 & 2 \end{array}\right].](https://s0.wp.com/latex.php?latex=%5Cnotag+++W_5%5E%2B+%3D+%5Cleft%5B%5Cbegin%7Barray%7D%7Bccccc%7D+2+%26+1+%26+0+%26+0+%26+0%5C%5C+1+%26+1+%26+1+%26+0+%26+0%5C%5C+0+%26+1+%26+0+%26+1+%26+0%5C%5C+0+%26+0+%26+1+%26+1+%26+1%5C%5C+0+%26+0+%26+0+%26+1+%26+2+%5Cend%7Barray%7D%5Cright%5D.+&bg=ffffff&fg=222222&s=0&c=20201002)
Here are the two largest eigenvalues of 
>> A = anymatrix('matlab/wilkinson',21);
>> e = eig(A); e([20 21])
ans =
10.746194182903322
10.746194182903393
These eigenvalues (which are correct to the digits shown) agree almost to the machine precision.
Notes
Theorem 2 is obtained for symmetric matrices by Malcolm and Palmer (1974), who suggest saving work in computing the LU factorization by setting 


A sample reference for Theorem 3 is Ikebe (1979), which is one of many papers on inverses of banded matrices.
The eigenvectors of a symmetric tridiagonal matrix satisfy some intricate relations; see Parlett (1998, sec. 7.9).
References
This is a minimal set of references, which contain further useful references within.
- Murray Dow, Explicit Inverses of Toeplitz and Associated Matrices, ANZIAM J. 44, E185–E215, 2003.
- Robert Gregory and David Karney, A Collection of Matrices for Testing Computational Algorithms, Wiley, 1969.
- Yasuhiko Ikebe, On inverses of Hessenberg matrices. Linear Algebra Appl., 24:93–97, 1979.
- Michael A. Malcolm and John Palmer, A Fast Method for Solving a Class of Tridiagonal Linear Systems, Comm. ACM 17, 14–17, 1974.
- Beresford Parlett, The Symmetric Eigenvalue Problem, Society for Industrial and Applied Mathematics, Philadelphia, PA, USA, 1998.
- J. H. Wilkinson, The Algebraic Eigenvalue Problem, Oxford University Press, 1965, Section 5.45.
 of vectors
of vectors  . The unblocked algorithm
. The unblocked algorithm


 , as
, as
 % Compute by the unblocked algorithm.
% Compute by the unblocked algorithm.
 of
of  . The natural computation is, from the definition of matrix multiplication, the “point algorithm”
. The natural computation is, from the definition of matrix multiplication, the “point algorithm”




 ,
,  , and
, and  be partitioned into blocks of size
be partitioned into blocks of size  is assumed to be an integer. The blocked computation is
is assumed to be an integer. The blocked computation is



 flops on about
flops on about  data, whereas the point algorithm performs
data, whereas the point algorithm performs  flops on
flops on  flops on
flops on  flops-to-data ratio that gives the blocked algorithm its advantage, because it masks the memory access costs.
flops-to-data ratio that gives the blocked algorithm its advantage, because it masks the memory access costs. ,
,  , and
, and  become
become  ,
,  , and
, and  ). It usually computes a block factorization, in which a matrix property based on the nonzero structure becomes the corresponding property blockwise; in particular, the scalars 0 and 1 become the zero matrix and the identity matrix, respectively.
). It usually computes a block factorization, in which a matrix property based on the nonzero structure becomes the corresponding property blockwise; in particular, the scalars 0 and 1 become the zero matrix and the identity matrix, respectively. matrix
matrix ![\notag A = \left[ \begin{tabular}{cc|cc} 1 & & & \\ x & 1 & & \\ \hline x & x & 1 & \\ x & x & x & 1 \end{tabular} \right] \left[ \begin{tabular}{cc|cc} x & x & x & x \\ & x & x & x \\ \hline & & x & x \\ & & & x \end{tabular} \right].](https://s0.wp.com/latex.php?latex=%5Cnotag++++A+%3D++%5Cleft%5B+%5Cbegin%7Btabular%7D%7Bcc%7Ccc%7D++++++++++++++++++1+%26+++%26++++%26++++%5C%5C++++++++++++++++++x+%26+1+%26++++%26++++%5C%5C++%5Chline++++++++++++++++++x+%26+x+%26++1+%26++++%5C%5C++++++++++++++++++x+%26+x+%26++x+%26+1+++++++++++++++++%5Cend%7Btabular%7D++%5Cright%5D++++++%5Cleft%5B+%5Cbegin%7Btabular%7D%7Bcc%7Ccc%7D++++++++++++++++++x+%26+x+%26++x+%26+x++%5C%5C++++++++++++++++++++%26+x+%26++x+%26+x++%5C%5C++%5Chline++++++++++++++++++++%26+++%26++x+%26+x++%5C%5C++++++++++++++++++++%26+++%26++++%26+x+++++++++++++++++%5Cend%7Btabular%7D++%5Cright%5D.+&bg=ffffff&fg=222222&s=0&c=20201002)
![\notag A = \left[ \begin{tabular}{cc|cc} 1 & 0 & & \\ 0 & 1 & & \\ \hline x & x & 1 & 0 \\ x & x & 0 & 1 \end{tabular} \right] \left[ \begin{tabular}{cc|cc} x & x & x & x \\ x & x & x & x \\ \hline & & x & x \\ & & x & x \end{tabular} \right].](https://s0.wp.com/latex.php?latex=%5Cnotag++++A+++%3D++%5Cleft%5B+%5Cbegin%7Btabular%7D%7Bcc%7Ccc%7D++++++++++++++++++1+%26+0+%26++++%26++++%5C%5C++++++++++++++++++0+%26+1+%26++++%26++++%5C%5C++%5Chline++++++++++++++++++x+%26+x+%26++1+%26+0++%5C%5C++++++++++++++++++x+%26+x+%26++0+%26+1+++++++++++++++++%5Cend%7Btabular%7D++%5Cright%5D++++++%5Cleft%5B+%5Cbegin%7Btabular%7D%7Bcc%7Ccc%7D++++++++++++++++++x+%26+x+%26++x+%26+x++%5C%5C++++++++++++++++++x+%26+x+%26++x+%26+x++%5C%5C++%5Chline++++++++++++++++++++%26+++%26++x+%26+x++%5C%5C++++++++++++++++++++%26+++%26++x+%26+x+++++++++++++++++%5Cend%7Btabular%7D++%5Cright%5D.+&bg=ffffff&fg=222222&s=0&c=20201002)
 satisfying
satisfying with equality if and only if
with equality if and only if  (nonnegativity),
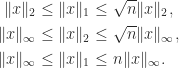
(nonnegativity), for all
for all  ,
,  (homogeneity),
(homogeneity), for all
for all  (the triangle inequality).
(the triangle inequality). the corresponding subordinate matrix norm on
the corresponding subordinate matrix norm on  is defined by
is defined by
 -vector norms it can be shown that
-vector norms it can be shown that
 denotes the largest singular value of
denotes the largest singular value of  -norm no explicit formula is known for
-norm no explicit formula is known for  for
for  .
.

 , whereas
, whereas  for any subordinate norm), but it is consistent.
for any subordinate norm), but it is consistent. for any unitary matrices
for any unitary matrices  . For the Frobenius norm the invariance follows easily from the trace formula.
. For the Frobenius norm the invariance follows easily from the trace formula. such that
such that  for
for 
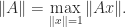
 is the spectral radius (the largest absolute value of any eigenvalue). To prove this inequality, let
is the spectral radius (the largest absolute value of any eigenvalue). To prove this inequality, let ![X=[x,x,\dots,x] \in \mathbb{C}^{n\times n}](https://s0.wp.com/latex.php?latex=X%3D%5Bx%2Cx%2C%5Cdots%2Cx%5D+%5Cin+%5Cmathbb%7BC%7D%5E%7Bn%5Ctimes+n%7D&bg=ffffff&fg=222222&s=0&c=20201002) . Then
. Then  , so
, so  , giving
, giving  since
since  . For a subordinate norm it suffices to take norms in the equation
. For a subordinate norm it suffices to take norms in the equation  .
.
 , where the first two equalities are obtained from the singular value decomposition and we have used (1).
, where the first two equalities are obtained from the singular value decomposition and we have used (1).
 .
. is given in the next result. Recall that
is given in the next result. Recall that  denotes the dual of the vector norm
denotes the dual of the vector norm  .
.
 . Here,
. Here,  denotes
denotes  .
. .
.
 – and
– and  -norms to be the same
-norms to be the same  , where
, where  (giving, in particular,
(giving, in particular,  and
and  , which are easily obtained directly).
, which are easily obtained directly). norm when
norm when 
 ,
,



 , where the maximum is attained for
, where the maximum is attained for  . For (4), using the Hölder inequality,
. For (4), using the Hölder inequality,
 th row of
th row of  .
. . The unit cube
. The unit cube  , where
, where ![e = [1,1,\dots,1]^T](https://s0.wp.com/latex.php?latex=e+%3D+%5B1%2C1%2C%5Cdots%2C1%5D%5ET&bg=ffffff&fg=222222&s=0&c=20201002) , is a convex polyhedron, so any point within it is a convex combination of the vertices, which are the elements of
, is a convex polyhedron, so any point within it is a convex combination of the vertices, which are the elements of  . Hence
. Hence  implies
implies

 , but trivially
, but trivially  and (5) follows.
and (5) follows. . Then, using a Cholesky factorization
. Then, using a Cholesky factorization  (which exists even if
(which exists even if 
 we have
we have
 . Hence
. Hence  , using (5).
, using (5). 

 -norm has recently found use in statistics (Cape, Tang, and Priebe, 2019), the motivation being that because it satisfies
-norm has recently found use in statistics (Cape, Tang, and Priebe, 2019), the motivation being that because it satisfies
 and so can be a better norm to use in bounds. The
and so can be a better norm to use in bounds. The  -norms are used by Rebrova and Vershynin (2018) in bounding the
-norms are used by Rebrova and Vershynin (2018) in bounding the  and
and  ) norm is not consistent, but for any vector norm
) norm is not consistent, but for any vector norm  , we have
, we have
 . This class of matrices includes magic squares and doubly stochastic matrices. We have
. This class of matrices includes magic squares and doubly stochastic matrices. We have  , so
, so  by (2). But
by (2). But  for the vector
for the vector  of
of  by (1). Hence
by (1). Hence  . In fact,
. In fact,  for all
for all ![p\in[1,\infty]](https://s0.wp.com/latex.php?latex=p%5Cin%5B1%2C%5Cinfty%5D&bg=ffffff&fg=222222&s=0&c=20201002) (see Higham (2002, Prob. 6.4) and Stoer and Witzgall (1962)).
(see Higham (2002, Prob. 6.4) and Stoer and Witzgall (1962)). ,
,  , or
, or  , for example, and we may wish to compute the norm without forming
, for example, and we may wish to compute the norm without forming  15.2). The power method accesses
15.2). The power method accesses  -norm and the
-norm and the  -norm, which we compare with the
-norm, which we compare with the ![p \in[1,25]](https://s0.wp.com/latex.php?latex=p+%5Cin%5B1%2C25%5D&bg=ffffff&fg=222222&s=0&c=20201002) . This shape of curve is typical, because, as the plot in the lower half indicates,
. This shape of curve is typical, because, as the plot in the lower half indicates,  is a convex function of
is a convex function of  for
for  (see Higham, 2002, Sec.
(see Higham, 2002, Sec.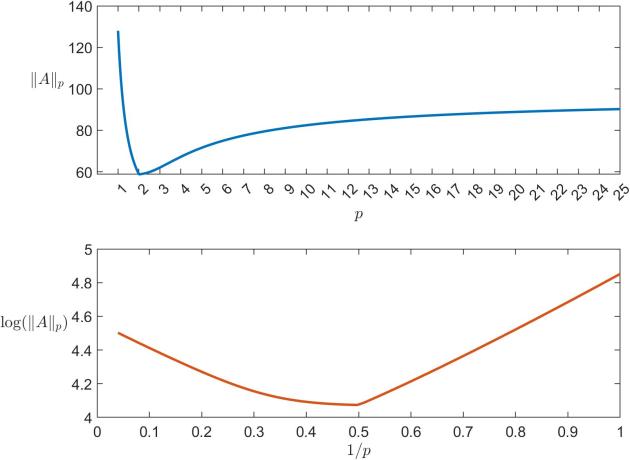
 norm, which is the max norm in (6), is investigated by Higham and Relton (2016) and extended to estimate the
norm, which is the max norm in (6), is investigated by Higham and Relton (2016) and extended to estimate the  or
or  .
. can be defined by
can be defined by

 for all
for all  independent of
independent of ![[1.33,1.41]](https://s0.wp.com/latex.php?latex=%5B1.33%2C1.41%5D&bg=ffffff&fg=222222&s=0&c=20201002) , or
, or ![[1.67,1.79]](https://s0.wp.com/latex.php?latex=%5B1.67%2C1.79%5D&bg=ffffff&fg=222222&s=0&c=20201002) for the analogous inequality for real data. See Friedland, Lim, and Zhang (2018) and the references therein.
for the analogous inequality for real data. See Friedland, Lim, and Zhang (2018) and the references therein. is due to Rohn (2000), who shows that evaluating it is NP-hard. For general
is due to Rohn (2000), who shows that evaluating it is NP-hard. For general 
 satisfying
satisfying with equality if and only if
with equality if and only if  (nonnegativity),
(nonnegativity), for all
for all  (homogeneity),
(homogeneity), for all
for all  (the triangle inequality).
(the triangle inequality).
 and is given by
and is given by


 , in which we are maximizing a continuous function over a compact set. Importantly, the dual of the dual norm is the original norm (Horn and Johnson, 2013, Thm.
, in which we are maximizing a continuous function over a compact set. Importantly, the dual of the dual norm is the original norm (Horn and Johnson, 2013, Thm.

 -norm, where
-norm, where 

 is used to denote the number of nonzero entries in
is used to denote the number of nonzero entries in  . In portfolio optimization, if
. In portfolio optimization, if  specifies how much to invest in stock
specifies how much to invest in stock  says “invest in at most
says “invest in at most  and
and  there exist positive constants
there exist positive constants  and
and  such that
such that
 , then
, then  .
. . One can simply use the formula
. One can simply use the formula  , but this requires two passes over the data (the first to evaluate
, but this requires two passes over the data (the first to evaluate  ). For more efficient one-pass algorithms for the
). For more efficient one-pass algorithms for the  .
. .
. are totally nonnegative then so is
are totally nonnegative then so is ![\alpha = [\alpha_1,\alpha_2,\dots,\alpha_k]](https://s0.wp.com/latex.php?latex=%5Calpha+%3D+%5B%5Calpha_1%2C%5Calpha_2%2C%5Cdots%2C%5Calpha_k%5D&bg=ffffff&fg=222222&s=0&c=20201002) is an index vector of order
is an index vector of order  satisfying
satisfying  . If
. If  , respectively, then
, respectively, then  denotes the
denotes the  matrix with (
matrix with ( ) element
) element  .
. , and
, and  then
then
 , (1) reduces to the well-known relation
, (1) reduces to the well-known relation  , while when
, while when  , (1) reduces to the definition of matrix multiplication.
, (1) reduces to the definition of matrix multiplication.
 comprises the indices not in
comprises the indices not in 
 , with
, with  . The Hilbert matrix is a particular case of a Cauchy matrix
. The Hilbert matrix is a particular case of a Cauchy matrix  , with
, with  for given vectors
for given vectors  . A Cauchy matrix is totally positive if
. A Cauchy matrix is totally positive if  and
and  , which follows from the formula
, which follows from the formula

 satisfy
satisfy 
 is defined by
is defined by
 with off-diagonal elements given by
with off-diagonal elements given by  with
with  , illustrated by
, illustrated by
![A([1,2],[2,3]) = \bigl[\begin{smallmatrix} \theta & \theta \\ 1 & \theta \end{smallmatrix}\bigr]](https://s0.wp.com/latex.php?latex=A%28%5B1%2C2%5D%2C%5B2%2C3%5D%29+%3D++++%5Cbigl%5B%5Cbegin%7Bsmallmatrix%7D++++%5Ctheta+%26+%5Ctheta+%5C%5C++++1++++++%26+%5Ctheta++++%5Cend%7Bsmallmatrix%7D%5Cbigr%5D+&bg=ffffff&fg=222222&s=0&c=20201002) has nonpositive determinant. However, the
has nonpositive determinant. However, the  , with
, with 
 with all elements
with all elements  by
by
 zero eigenvalues, which appear in a single Jordan block, and its largest eigenvalue is
zero eigenvalues, which appear in a single Jordan block, and its largest eigenvalue is  . In MATLAB, this matrix can be generated by
. In MATLAB, this matrix can be generated by 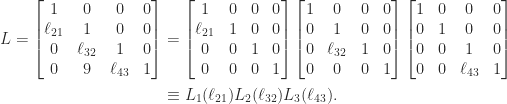
 ,
,  , and
, and  are totally nonnegative, so
are totally nonnegative, so  , we have
, we have
 , where
, where
 denotes the submatrix of
denotes the submatrix of  has a checkerboard (alternating) sign pattern. Indeed, we can write
has a checkerboard (alternating) sign pattern. Indeed, we can write  , where
, where  and
and  such that
such that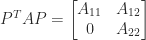
 and
and  are square, nonempty submatrices.
are square, nonempty submatrices. . It is known that the eigenvector
. It is known that the eigenvector  has
has  sign changes, that is,
sign changes, that is,  and (
and ( have opposite signs for
have opposite signs for  , we already know from Perron–Frobenius theory that there is a positive eigenvector
, we already know from Perron–Frobenius theory that there is a positive eigenvector  . This result is illustrated by the Pascal matrix above:
. This result is illustrated by the Pascal matrix above: is totally positive for some positive integer
is totally positive for some positive integer 
 .
. for
for  , which guarantees the existence of an LU factorization. That the elements of
, which guarantees the existence of an LU factorization. That the elements of  and computes
and computes  , since
, since  . Thus
. Thus  ,
,  . For
. For  ,
,  ; for
; for  ,
,  . Thus
. Thus  for all
for all  and hence
and hence  . But
. But  , so
, so  .
. and
and  will have nonnegative elements and so from the standard backward error result for LU factorization,
will have nonnegative elements and so from the standard backward error result for LU factorization,

 and hence
and hence

 is a diagonal matrix with positive diagonal entries and
is a diagonal matrix with positive diagonal entries and  and
and  are unit lower and unit upper bidiagonal matrices, respectively, with the first
are unit lower and unit upper bidiagonal matrices, respectively, with the first  entries along the subdiagonal of
entries along the subdiagonal of  zero and the rest nonnegative.
zero and the rest nonnegative. subdiagonal entries of
subdiagonal entries of  principal minors (ones based on submatrices centred on the diagonal) and
principal minors (ones based on submatrices centred on the diagonal) and  minors in total. However, it is not necessary to check all these minors to test for total positivity.
minors in total. However, it is not necessary to check all these minors to test for total positivity. for all index vectors
for all index vectors ![[1,2,\dots,k]](https://s0.wp.com/latex.php?latex=%5B1%2C2%2C%5Cdots%2Ck%5D&bg=ffffff&fg=222222&s=0&c=20201002) and the entries of the other are
and the entries of the other are  minors need to be tested. Gasca and Peña have also show that total nonnegativity can be tested by checking about
minors need to be tested. Gasca and Peña have also show that total nonnegativity can be tested by checking about  minors. A more efficient way to test for total nonnegativity is to compute the factorization in Theorem 6 and check the signs of the entries.
minors. A more efficient way to test for total nonnegativity is to compute the factorization in Theorem 6 and check the signs of the entries. the spectral radius of
the spectral radius of  .
. ,
, ,
, for any eigenvalue
for any eigenvalue  .
. , is called the Perron vector.
, is called the Perron vector.![A = \bigl[\begin{smallmatrix}0 & 1 \\ 0 & 0 \end{smallmatrix}\bigr]](https://s0.wp.com/latex.php?latex=A+%3D+%5Cbigl%5B%5Cbegin%7Bsmallmatrix%7D0+%26+1+%5C%5C+0+%26+0+%5Cend%7Bsmallmatrix%7D%5Cbigr%5D&bg=ffffff&fg=222222&s=0&c=20201002) : Theorem 1 says that
: Theorem 1 says that  is an eigenvalue and and that it has a nonnegative eigenvector. Indeed
is an eigenvalue and and that it has a nonnegative eigenvector. Indeed ![[1~0]^T](https://s0.wp.com/latex.php?latex=%5B1%7E0%5D%5ET&bg=ffffff&fg=222222&s=0&c=20201002) is an eigenvector. Note that
is an eigenvector. Note that  is a repeated eigenvalue.
is a repeated eigenvalue.![A = \bigl[\begin{smallmatrix}0 & 1 \\ 1 & 0 \end{smallmatrix}\bigr]](https://s0.wp.com/latex.php?latex=A+%3D+%5Cbigl%5B%5Cbegin%7Bsmallmatrix%7D0+%26+1+%5C%5C+1+%26+0+%5Cend%7Bsmallmatrix%7D%5Cbigr%5D&bg=ffffff&fg=222222&s=0&c=20201002) :
:  and
and ![[1~1]^T/2](https://s0.wp.com/latex.php?latex=%5B1%7E1%5D%5ET%2F2&bg=ffffff&fg=222222&s=0&c=20201002) is the Perron vector for the Perron root
is the Perron vector for the Perron root ![A = \bigl[\begin{smallmatrix}1 & 1 \\ 1 & 1 \end{smallmatrix}\bigr]](https://s0.wp.com/latex.php?latex=A+%3D+%5Cbigl%5B%5Cbegin%7Bsmallmatrix%7D1+%26+1+%5C%5C+1+%26+1+%5Cend%7Bsmallmatrix%7D%5Cbigr%5D&bg=ffffff&fg=222222&s=0&c=20201002) : Theorem 3 says that
: Theorem 3 says that  is an eigenvalue with positive eigenvector and that the other eigenvalue has modulus less than
is an eigenvalue with positive eigenvector and that the other eigenvalue has modulus less than 
 is an eigenvalue of
is an eigenvalue of ![[1~1~1]^T/3](https://s0.wp.com/latex.php?latex=%5B1%7E1%7E1%5D%5ET%2F3&bg=ffffff&fg=222222&s=0&c=20201002) . Two of the eigenvalues are complex, however, and all three eigenvalues have modulus 1, as they must because
. Two of the eigenvalues are complex, however, and all three eigenvalues have modulus 1, as they must because  , where
, where  . Since
. Since  for any norm, by taking the
for any norm, by taking the  then
then
 (since
(since  ).
). . If
. If  and Theorem 4 says that
and Theorem 4 says that  . We illustrate this result in MATLAB using a scaled magic square matrix.
. We illustrate this result in MATLAB using a scaled magic square matrix.
 , as
, as  is the rank-
is the rank- , and it is also rank-
, and it is also rank- , as in this case every column is a multiple of the vector with alternating elements
, as in this case every column is a multiple of the vector with alternating elements  . For
. For  ,
,  is nonsingular and the inverse is the tridiagonal (but not Toeplitz) matrix
is nonsingular and the inverse is the tridiagonal (but not Toeplitz) matrix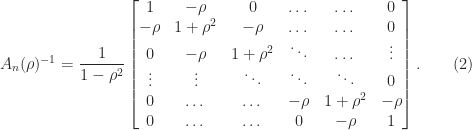
 ,
,  is positive definite, since every leading principal submatrix has positive determinant, as can also be seen by noting that the inverse is diagonally dominant with positive diagonal, so that
is positive definite, since every leading principal submatrix has positive determinant, as can also be seen by noting that the inverse is diagonally dominant with positive diagonal, so that  is positive definite and hence
is positive definite and hence  ,
,  ,
,  , we know that
, we know that  with
with 

 for
for  .
. continues to hold with
continues to hold with  replaced by
replaced by  .
.
 permutations
permutations  ) of the sequence
) of the sequence  and
and  is the number of inversions in
is the number of inversions in  , that is, the number of pairs
, that is, the number of pairs  with
with  . Each term in the sum is a signed product of
. Each term in the sum is a signed product of  .
.

 , where
, where  denotes the
denotes the  submatrix of
submatrix of  for a scalar
for a scalar  . This formula is called the expansion by minors because
. This formula is called the expansion by minors because  is a minor of
is a minor of  is triangular then
is triangular then  . If
. If  is unitary then
is unitary then  on using (3) and (4). An
on using (3) and (4). An  of
of  . Since the eigenvalues are the roots of the characteristic polynomial
. Since the eigenvalues are the roots of the characteristic polynomial  , this relation follows by setting
, this relation follows by setting  in the expression
in the expression
 , the determinant is
, the determinant is
 the determinant is tedious to write down. If one must compute
the determinant is tedious to write down. If one must compute  . As this expression indicates, the determinant is prone to overflow and underflow in floating-point arithmetic, so it may be preferable to compute
. As this expression indicates, the determinant is prone to overflow and underflow in floating-point arithmetic, so it may be preferable to compute  .
.
 is the
is the  element
element  ). More generally, Cramer’s rule says that the components of the solution to a linear system
). More generally, Cramer’s rule says that the components of the solution to a linear system  are given by
are given by  , where
, where  denotes
denotes  is Hadamard’s inequality. Note that for such
is Hadamard’s inequality. Note that for such  ,
,  is real and positive (being the product of the eigenvalues, which are real and positive) and the diagonal elements are also real and positive (since
is real and positive (being the product of the eigenvalues, which are real and positive) and the diagonal elements are also real and positive (since  ).
).
 or by using a QR factorization of
or by using a QR factorization of ![A = [a_1,a_2,\dots,a_n] \in\mathbb{C}^{n\times n}](https://s0.wp.com/latex.php?latex=A+%3D+%5Ba_1%2Ca_2%2C%5Cdots%2Ca_n%5D+%5Cin%5Cmathbb%7BC%7D%5E%7Bn%5Ctimes+n%7D&bg=ffffff&fg=222222&s=0&c=20201002) ,
,
 , whose sides are the columns of
, whose sides are the columns of  . It might be tempting to use
. It might be tempting to use  as a measure of how close a nonsingular matrix
as a measure of how close a nonsingular matrix  can be given any value by a suitable choice of
can be given any value by a suitable choice of  is perfectly conditioned:
is perfectly conditioned:  , where
, where  is the condition number.
is the condition number.
 and
and  if and only if the columns of
if and only if the columns of  the Hadamard condition number. In general,
the Hadamard condition number. In general,  , but if
, but if  (Higham, 2002, Prob. 14.13). Dixon (1984) shows that for classes of
(Higham, 2002, Prob. 14.13). Dixon (1984) shows that for classes of 
 , so
, so  for large
for large  , where
, where  denotes the mean value. This MATLAB example illustrates these points.
denotes the mean value. This MATLAB example illustrates these points.
 term is the permanent. The permanent arises in combinatorics and quantum mechanics and is much harder to compute than the determinant: no algorithm is known for computing the permanent in
term is the permanent. The permanent arises in combinatorics and quantum mechanics and is much harder to compute than the determinant: no algorithm is known for computing the permanent in  operations for a polynomial
operations for a polynomial  , …,
, …,  by
by
 of degree at most
of degree at most  , that is,
, that is,  ,
, 
![a = [a_1,a_2,\dots,a_n]^T](https://s0.wp.com/latex.php?latex=a+%3D+%5Ba_1%2Ca_2%2C%5Cdots%2Ca_n%5D%5ET&bg=ffffff&fg=222222&s=0&c=20201002) is the vector of coefficients. This is known as the dual problem. We know from polynomial interpolation theory that there is a unique interpolant if the
is the vector of coefficients. This is known as the dual problem. We know from polynomial interpolation theory that there is a unique interpolant if the 
 find weights
find weights  such that
such that  ,
,  for some
for some  then
then  . Consequently, we have
. Consequently, we have
 in the
in the  contains a term
contains a term  (from the main diagonal), so
(from the main diagonal), so  . Hence
. Hence
 . Equating elements in the
. Equating elements in the  gives
gives
 is the Kronecker delta (equal to
is the Kronecker delta (equal to  and
and  takes the value
takes the value  and
and  ,
,  . It is not hard to see that this polynomial is the Lagrange basis polynomial:
. It is not hard to see that this polynomial is the Lagrange basis polynomial:

 denotes the sum of all distinct products of
denotes the sum of all distinct products of  (that is,
(that is,  is the
is the  and
and  has a checkerboard sign pattern: the
has a checkerboard sign pattern: the  .
.
 is a degree
is a degree 
 and
and  .
. and
and ![\notag V = \left[\begin{array}{ccccc} 1 & 1 & 1 & 1 & 1\\ 0 & \frac{1}{4} & \frac{1}{2} & \frac{3}{4} & 1\\[\smallskipamount] 0 & \frac{1}{16} & \frac{1}{4} & \frac{9}{16} & 1\\[\smallskipamount] 0 & \frac{1}{64} & \frac{1}{8} & \frac{27}{64} & 1\\[\smallskipamount] 0 & \frac{1}{256} & \frac{1}{16} & \frac{81}{256} & 1 \end{array}\right], \quad V^{-1} = \left[\begin{array}{ccccc} 1 & -\frac{25}{3} & \frac{70}{3} & -\frac{80}{3} & \frac{32}{3}\\[\smallskipamount] 0 & 16 & -\frac{208}{3} & 96 & -\frac{128}{3}\\ 0 & -12 & 76 & -128 & 64\\[\smallskipamount] 0 & \frac{16}{3} & -\frac{112}{3} & \frac{224}{3} & -\frac{128}{3}\\[\smallskipamount] 0 & -1 & \frac{22}{3} & -16 & \frac{32}{3} \end{array}\right],](https://s0.wp.com/latex.php?latex=%5Cnotag+V+%3D+%5Cleft%5B%5Cbegin%7Barray%7D%7Bccccc%7D+1+%26+1+%26+1+%26+1+%26+1%5C%5C+0+%26+%5Cfrac%7B1%7D%7B4%7D+%26+%5Cfrac%7B1%7D%7B2%7D+%26+%5Cfrac%7B3%7D%7B4%7D+%26+1%5C%5C%5B%5Csmallskipamount%5D+0+%26+%5Cfrac%7B1%7D%7B16%7D+%26+%5Cfrac%7B1%7D%7B4%7D+%26+%5Cfrac%7B9%7D%7B16%7D+%26+1%5C%5C%5B%5Csmallskipamount%5D+0+%26+%5Cfrac%7B1%7D%7B64%7D+%26+%5Cfrac%7B1%7D%7B8%7D+%26+%5Cfrac%7B27%7D%7B64%7D+%26+1%5C%5C%5B%5Csmallskipamount%5D+0+%26+%5Cfrac%7B1%7D%7B256%7D+%26+%5Cfrac%7B1%7D%7B16%7D+%26+%5Cfrac%7B81%7D%7B256%7D+%26+1+%5Cend%7Barray%7D%5Cright%5D%2C+%5Cquad+V%5E%7B-1%7D+%3D+%5Cleft%5B%5Cbegin%7Barray%7D%7Bccccc%7D+1+%26+-%5Cfrac%7B25%7D%7B3%7D+%26+%5Cfrac%7B70%7D%7B3%7D+%26+-%5Cfrac%7B80%7D%7B3%7D+%26+%5Cfrac%7B32%7D%7B3%7D%5C%5C%5B%5Csmallskipamount%5D+0+%26+16+%26+-%5Cfrac%7B208%7D%7B3%7D+%26+96+%26+-%5Cfrac%7B128%7D%7B3%7D%5C%5C+0+%26+-12+%26+76+%26+-128+%26+64%5C%5C%5B%5Csmallskipamount%5D+0+%26+%5Cfrac%7B16%7D%7B3%7D+%26+-%5Cfrac%7B112%7D%7B3%7D+%26+%5Cfrac%7B224%7D%7B3%7D+%26+-%5Cfrac%7B128%7D%7B3%7D%5C%5C%5B%5Csmallskipamount%5D+0+%26+-1+%26+%5Cfrac%7B22%7D%7B3%7D+%26+-16+%26+%5Cfrac%7B32%7D%7B3%7D+%5Cend%7Barray%7D%5Cright%5D%2C+&bg=ffffff&fg=222222&s=0&c=20201002)
 .
. satisfies
satisfies
 for all
for all  for all
for all  . It is also known that for any set of real points
. It is also known that for any set of real points 
 we have
we have  , where the lower bound is an extremely fast growing function of the dimension!
, where the lower bound is an extremely fast growing function of the dimension! of Björck and Pereyra (1970). There is now a long list of generalizations of this algorithm in various directions, including for confluent Vandermonde-like matrices (Higham, 1990), as well as for more specialized problems (Demmel and Koev, 2005) and more general ones (Bella et al., 2009). Another important observation is that the exponential lower bounds are for real nodes. For complex nodes
of Björck and Pereyra (1970). There is now a long list of generalizations of this algorithm in various directions, including for confluent Vandermonde-like matrices (Higham, 1990), as well as for more specialized problems (Demmel and Koev, 2005) and more general ones (Bella et al., 2009). Another important observation is that the exponential lower bounds are for real nodes. For complex nodes  can be much better conditioned. Indeed when the
can be much better conditioned. Indeed when the  is the unitary Fourier matrix and so
is the unitary Fourier matrix and so  we obtain
we obtain
 in the case of (4)).
in the case of (4)). with
with  having degree
having degree 
 . This little matrix has been used as an example and for test purposes in many research papers and books over the years, in particular by John Todd, who described it as “the notorious matrix
. This little matrix has been used as an example and for test purposes in many research papers and books over the years, in particular by John Todd, who described it as “the notorious matrix  of T. S. Wilson”.
of T. S. Wilson”. for a “positive definite symmetric
for a “positive definite symmetric  ” and he gave the positive definite matrix
” and he gave the positive definite matrix
 . The matrix
. The matrix  is therefore a factor 12 more ill conditioned than
is therefore a factor 12 more ill conditioned than 
 and found that about 0.21 percent of them had a larger condition number than
and found that about 0.21 percent of them had a larger condition number than 
 . How far is this matrix from being a worst case?
. How far is this matrix from being a worst case?
 for
for  . It is possible to obtain a bound from first principles by using the relation
. It is possible to obtain a bound from first principles by using the relation  since
since  ,
,
 , using the fact that
, using the fact that  is monotonically increasing for
is monotonically increasing for  , gives
, gives
 ,
,
 , since
, since  we have
we have  , and hence
, and hence
 . The bounds (1) and (2) remain valid if we modify the definitions of
. The bounds (1) and (2) remain valid if we modify the definitions of  to allow zero elements (note that Rutishauser’s matrix
to allow zero elements (note that Rutishauser’s matrix  elements. Exhaustively searching over the sets in reasonable time is possible with a carefully optimized code. Higham and Lettington (2021) use a MATLAB code that loops over all symmetric matrices with integer elements between
elements. Exhaustively searching over the sets in reasonable time is possible with a carefully optimized code. Higham and Lettington (2021) use a MATLAB code that loops over all symmetric matrices with integer elements between  (since
(since 
 . and determinant
. and determinant  . The maximum over
. The maximum over 
 and determinant
and determinant 










![\notag R = \begin{bmatrix} \sqrt{5} & \frac{7\,\sqrt{5}}{5} & \frac{6\,\sqrt{5}}{5} & \sqrt{5}\\[\smallskipamount] 0 & \frac{\sqrt{5}}{5} & -\frac{2\,\sqrt{5}}{5} & 0\\[\smallskipamount] 0 & 0 & \sqrt{2} & \frac{3\,\sqrt{2}}{2}\\[\smallskipamount] 0 & 0 & 0 & \frac{\sqrt{2}}{2} \end{bmatrix} \quad (W = R^TR).](https://s0.wp.com/latex.php?latex=%5Cnotag+R+%3D+%5Cbegin%7Bbmatrix%7D+%5Csqrt%7B5%7D+%26+%5Cfrac%7B7%5C%2C%5Csqrt%7B5%7D%7D%7B5%7D+%26+%5Cfrac%7B6%5C%2C%5Csqrt%7B5%7D%7D%7B5%7D+%26+%5Csqrt%7B5%7D%5C%5C%5B%5Csmallskipamount%5D+0+%26+%5Cfrac%7B%5Csqrt%7B5%7D%7D%7B5%7D+%26+-%5Cfrac%7B2%5C%2C%5Csqrt%7B5%7D%7D%7B5%7D+%26+0%5C%5C%5B%5Csmallskipamount%5D+0+%26+0+%26+%5Csqrt%7B2%7D+%26+%5Cfrac%7B3%5C%2C%5Csqrt%7B2%7D%7D%7B2%7D%5C%5C%5B%5Csmallskipamount%5D+0+%26+0+%26+0+%26+%5Cfrac%7B%5Csqrt%7B2%7D%7D%7B2%7D+%5Cend%7Bbmatrix%7D+%5Cquad+%28W+%3D+R%5ETR%29.+&bg=ffffff&fg=222222&s=0&c=20201002)
 element, it is unremarkable. If we factor out the diagonal then we obtain the
element, it is unremarkable. If we factor out the diagonal then we obtain the  factorization, which has rational elements:
factorization, which has rational elements:
 with a
with a  matrix
matrix  with
with  , but examples are known for
, but examples are known for  for which the factorization does not exist. This result is mentioned by Taussky (1961) and goes back to Hermite, Minkowski, and Mordell. Higham and Lettington (2021) found the integer factor
for which the factorization does not exist. This result is mentioned by Taussky (1961) and goes back to Hermite, Minkowski, and Mordell. Higham and Lettington (2021) found the integer factor
 it is necessary that a certain quadratic equation in
it is necessary that a certain quadratic equation in 
 and two rational factors:
and two rational factors:![\notag Z_1=\left[ \begin{array}{cccc} \frac{1}{2} & 1 & 0 & 1 \\ \frac{3}{2} & 2 & 3 & 3 \\ \frac{1}{2} & 1 & 0 & 0 \\ \frac{3}{2} & 2 & 1 & 0 \\ \end{array} \right], \quad Z_2=\left[ \begin{array}{@{\mskip2mu}rrrr} \frac{3}{2} & 2 & 2 & 2 \\ \frac{3}{2} & 2 & 2 & 1 \\ \frac{1}{2} & 1 & 1 & 2 \\ -\frac{1}{2} & -1 & 1 & 1 \\ \end{array} \right].](https://s0.wp.com/latex.php?latex=%5Cnotag+Z_1%3D%5Cleft%5B+%5Cbegin%7Barray%7D%7Bcccc%7D++%5Cfrac%7B1%7D%7B2%7D+%26+1+%26+0+%26+1+%5C%5C++%5Cfrac%7B3%7D%7B2%7D+%26+2+%26+3+%26+3+%5C%5C++%5Cfrac%7B1%7D%7B2%7D+%26+1+%26+0+%26+0+%5C%5C++%5Cfrac%7B3%7D%7B2%7D+%26+2+%26+1+%26+0+%5C%5C+%5Cend%7Barray%7D+%5Cright%5D%2C+%5Cquad+Z_2%3D%5Cleft%5B+%5Cbegin%7Barray%7D%7B%40%7B%5Cmskip2mu%7Drrrr%7D++%5Cfrac%7B3%7D%7B2%7D+%26+2+%26+2+%26+2+%5C%5C++%5Cfrac%7B3%7D%7B2%7D+%26+2+%26+2+%26+1+%5C%5C++%5Cfrac%7B1%7D%7B2%7D+%26+1+%26+1+%26+2+%5C%5C++-%5Cfrac%7B1%7D%7B2%7D+%26+-1+%26+1+%26+1+%5C%5C+%5Cend%7Barray%7D+%5Cright%5D.+&bg=ffffff&fg=222222&s=0&c=20201002)
 of
of  (a problem also considered in Higham, Lettington, and Schmidt (2021)), with integer
(a problem also considered in Higham, Lettington, and Schmidt (2021)), with integer 