Matrix rank is an important concept in linear algebra. While rank deficiency can be a sign of an incompletely or improperly specified problem (a singular system of linear equations, for example), in some problems low rank of a matrix is a desired property or outcome. Here we present some fundamental rank relations in a concise form useful for reference. These are all immediate consequences of the singular value decomposition (SVD), but we give elementary (albeit not entirely self-contained) proofs of them.
The rank of a matrix 


A rank-





Each column of 






Here are some fundamental rank equalities and inequalities.
Rank-Nullity Theorem
The rank-nullity theorem says that

where 
Rank Bound
The rank cannot exceed the number of columns, or, by (5) below, the number of rows:

Rank of a Sum
For any 

The upper bound follows from the fact that the dimension of the sum of two subspaces cannot exceed the sum of the dimensions of the subspaces. Interestingly, the upper bound is also a corollary of the bound (3) for the rank of a matrix product, because
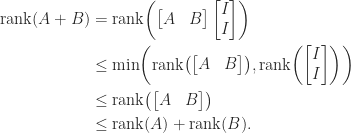
For the lower bound, writing 

Rank of and 
For any

Indeed 


Rank of a General Product
For any 

If ![B = [b_1,\dots,b_n]](https://s0.wp.com/latex.php?latex=B+%3D+%5Bb_1%2C%5Cdots%2Cb_n%5D&bg=ffffff&fg=222222&s=0&c=20201002)
![AB = [Ab_1,\dots,Ab_n]](https://s0.wp.com/latex.php?latex=AB+%3D+%5BAb_1%2C%5Cdots%2CAb_n%5D&bg=ffffff&fg=222222&s=0&c=20201002)


The latter inequality can be proved without using (5) (our proof of which uses (3)), as follows. Suppose 









Rank of a Product of Full-Rank Matrices
We have

We note that 


and hence 
Another important relation is

This is a consequence of the equality 
Ranks of and 
By (2) and (3) we have 


In other words, the rank of
Full-Rank Factorization









![Y = [y_1,y_2,\dots, y_n]](https://s0.wp.com/latex.php?latex=Y+%3D+%5By_1%2Cy_2%2C%5Cdots%2C+y_n%5D&bg=ffffff&fg=222222&s=0&c=20201002)




Rank and Minors
A characterization of rank that is sometimes used as the definition is that it is the size of the largest nonsingular square submatrix. Equivalently, the rank is the size of the largest nonzero minor, where a minor of size 
rank(AB) and rank(BA)
Although 







Note that 




How to Find Rank
If we have a full-rank factorization of

where 




In floating-point arithmetic, the standard algorithms for computing the SVD are numerically stable, that is, the computed singular values are the exact singular values of a matrix 



>> n = 4; A = zeros(n); A(:) = 1:n^2, svd(A)
A =
1 5 9 13
2 6 10 14
3 7 11 15
4 8 12 16
ans =
3.8623e+01
2.0713e+00
1.5326e-15
1.3459e-16
The matrix has rank 

rank function computes the rank as the number of singular values exceeding 

References
An excellent reference for further rank relations is Horn and Johnson. Stewart describes some of the issues associated with rank-deficient matrices in practical computation.
- Roger A. Horn and Charles R. Johnson, Matrix Analysis, second edition, Cambridge University Press, 2013. My review of the second edition.
- G. W. Stewart, Rank Degeneracy, SIAM J. Sci. Statist. Comput. 5 (2), 403–413, 1984
 such that
such that
 needs to make any negative eigenvalues of
needs to make any negative eigenvalues of  and assume that
and assume that  .
. ,
,  has eigenvalues
has eigenvalues  , and so the smallest possible
, and so the smallest possible  is
is  . This choice of
. This choice of  , so that each diagonal entry undergoes a relative perturbation of size
, so that each diagonal entry undergoes a relative perturbation of size  . Write
. Write  and note that
and note that  is symmetric with unit diagonal. Then
is symmetric with unit diagonal. Then
 is positive semidefinite if and only if
is positive semidefinite if and only if  is positive semidefinite, the smallest possible
is positive semidefinite, the smallest possible  .
. as
as  independent variables and ask for the solution of the optimization problem
independent variables and ask for the solution of the optimization problem
 (since
(since  and
and  .
. is positive semidefinite then from standard eigenvalue inequalities,
is positive semidefinite then from standard eigenvalue inequalities,

 satisfies the constraints of
satisfies the constraints of  , this means that this
, this means that this  -norm, though the solution is obviously not unique in general.
-norm, though the solution is obviously not unique in general. such that
such that  for an upper triangular
for an upper triangular  with positive diagonal elements, so that
with positive diagonal elements, so that  is positive definite. The methods of Gill, Murray, and Wright (1981) and Schnabel and Eskow (1990) compute a diagonal
is positive definite. The methods of Gill, Murray, and Wright (1981) and Schnabel and Eskow (1990) compute a diagonal  ) flops), so this approach is likely to require fewer flops than computing the minimum eigenvalue or solving an optimization problem, but the perturbations produces will not be optimal.
) flops), so this approach is likely to require fewer flops than computing the minimum eigenvalue or solving an optimization problem, but the perturbations produces will not be optimal. Fiedler matrix
Fiedler matrix , so
, so  . The Gill–Murray–Wright method gives
. The Gill–Murray–Wright method gives  with diagonal elements
with diagonal elements while the Schnabel–Eskow method gives
while the Schnabel–Eskow method gives  with diagonal elements
with diagonal elements . If we increase the diagonal elements of
. If we increase the diagonal elements of  by 0.5 to give comparable smallest eigenvalues for the perturbed matrices then we have
by 0.5 to give comparable smallest eigenvalues for the perturbed matrices then we have

 symmetric positive definite matrix
symmetric positive definite matrix  to be the matrix resulting from adding
to be the matrix resulting from adding  to the
to the  and
and  elements and we ask when is
elements and we ask when is 
 has rank
has rank  ,
,  repeated
repeated  times. Hence we can write
times. Hence we can write  , where
, where  and
and  . Adding
. Adding  to
to  decreases or leaves unchanged each eigenvalue. However, more is true: after each of these rank-
decreases or leaves unchanged each eigenvalue. However, more is true: after each of these rank- , we have (Horn and Johnson, Cor. 4.3.7)
, we have (Horn and Johnson, Cor. 4.3.7)
 , so
, so  is the product of the eigenvalues of
is the product of the eigenvalues of  .
.
 . Hence the condition for
. Hence the condition for 

 for
for
 .
. is set to zero is
is set to zero is  , or equivalently
, or equivalently  . To check either of these conditions we need just
. To check either of these conditions we need just  ,
,  , and
, and  . These elements can be computed without computing the whole inverse by solving the equations
. These elements can be computed without computing the whole inverse by solving the equations  for
for  , for the
, for the  of
of  Lehmer matrix, which has
Lehmer matrix, which has  for
for  :
:![\notag A = \begin{bmatrix} 1 & \frac{1}{2} & \frac{1}{3} & \frac{1}{4} \\[3pt] \frac{1}{2} & 1 & \frac{2}{3} & \frac{1}{2} \\[3pt] \frac{1}{3} & \frac{2}{3} & 1 & \frac{3}{4} \\[3pt] \frac{1}{4} & \frac{1}{2} & \frac{3}{4} & 1 \end{bmatrix}.](https://s0.wp.com/latex.php?latex=%5Cnotag+++A+%3D+%5Cbegin%7Bbmatrix%7D+++++++++1+++++++++++%26+%5Cfrac%7B1%7D%7B2%7D++%26+%5Cfrac%7B1%7D%7B3%7D+%26+%5Cfrac%7B1%7D%7B4%7D+%5C%5C%5B3pt%5D+++++++++%5Cfrac%7B1%7D%7B2%7D+%26+++++++++++1++%26+%5Cfrac%7B2%7D%7B3%7D+%26+%5Cfrac%7B1%7D%7B2%7D+%5C%5C%5B3pt%5D+++++++++%5Cfrac%7B1%7D%7B3%7D+%26++%5Cfrac%7B2%7D%7B3%7D+%26+1+++++++++++%26+%5Cfrac%7B3%7D%7B4%7D+%5C%5C%5B3pt%5D+++++++++%5Cfrac%7B1%7D%7B4%7D+%26++%5Cfrac%7B1%7D%7B2%7D+%26+%5Cfrac%7B3%7D%7B4%7D+%26++1+++++++++%5Cend%7Bbmatrix%7D.+&bg=ffffff&fg=222222&s=0&c=20201002)
 . Any off-diagonal element except the
. Any off-diagonal element except the  element can be zeroed without destroying positive definiteness, and if the
element can be zeroed without destroying positive definiteness, and if the  . For
. For  and
and  , the following plot shows in red
, the following plot shows in red  and in blue
and in blue  ; the black dots are the endpoints of the closure of the interval
; the black dots are the endpoints of the closure of the interval  and the vertical black line is the value
and the vertical black line is the value  . Clearly,
. Clearly,  , which is why zeroing this element causes a loss of positive definiteness. Note that
, which is why zeroing this element causes a loss of positive definiteness. Note that  to any number less than
to any number less than  without losing definiteness.
without losing definiteness.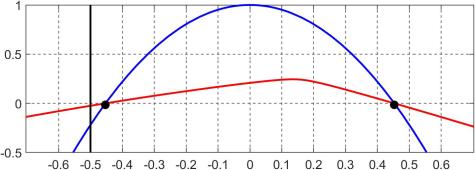
 of elements to be modified we may wish to determine subsets (including a maximal subset) of
of elements to be modified we may wish to determine subsets (including a maximal subset) of  on the smallest eigenvalue, which corresponds to another projection. Both these projections are supported in the algorithm of Higham and Strabić (2016), implemented in the code at
on the smallest eigenvalue, which corresponds to another projection. Both these projections are supported in the algorithm of Higham and Strabić (2016), implemented in the code at  is (to four significant figures)
is (to four significant figures)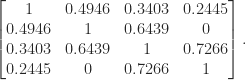
 -Factorizations with Small Pivots
-Factorizations with Small Pivots is unitarily invariant if
is unitarily invariant if  for all unitary
for all unitary  and
and  and for all
and for all  and
and  , using the fact that
, using the fact that  , we obtain
, we obtain
 ,
,

 , so
, so  depends only on the singular values. Indeed, for the 2-norm and the Frobenius norm we have
depends only on the singular values. Indeed, for the 2-norm and the Frobenius norm we have  and
and  . Here, and throughout this article,
. Here, and throughout this article,  . Another implication of the singular value dependence is that
. Another implication of the singular value dependence is that  for all
for all  such that
such that  is an absolute norm on
is an absolute norm on  and
and  for any permutation matrix
for any permutation matrix  and all
and all  for all
for all  implies
implies  for all
for all  for all
for all  are the singular values of
are the singular values of  -norm, obtaining the class of Schatten
-norm, obtaining the class of Schatten 
 , which is called the trace norm or nuclear norm. It can act as a proxy for the rank of a matrix. The trace norm can be expressed as
, which is called the trace norm or nuclear norm. It can act as a proxy for the rank of a matrix. The trace norm can be expressed as  , where
, where  is a polar decomposition.
is a polar decomposition.
 and
and  .
. , the matrix
, the matrix  is the
is the  (
( ), the unitary polar factor is the
), the unitary polar factor is the  have SVDs with diagonal matrices
have SVDs with diagonal matrices  , where the diagonal elements are arranged in nonincreasing order. Then
, where the diagonal elements are arranged in nonincreasing order. Then  for every unitarily invariant norm.
for every unitarily invariant norm. for which the product
for which the product  is defined,
is defined,
 for all
for all  if and only if
if and only if  for all
for all  for all
for all  if and only if the norm is a positive scalar multiple of the Frobenius norm.
if and only if the norm is a positive scalar multiple of the Frobenius norm.