An 


The definition says that the inner product of the 






For a general diagonalizable matrix, 



Many equivalent conditions to
The normal matrices include the classes of matrix given in this table:
| Real | Complex |
|---|---|
| Diagonal | Diagonal |
| Symmetric | Hermitian |
| Skew-symmetric | Skew-Hermitian |
| Orthogonal | Unitary |
| Circulant | Circulant |
Circulant matrices are
They are diagonalized by a unitary matrix known as the discrete Fourier transform matrix, which has 

A normal matrix is not necessarily of the form given in the table, even for 

![\notag \left[\begin{array}{@{\mskip2mu}rr@{\mskip2mu}} a & b\\ b & c \end{array}\right], \quad \left[\begin{array}{@{}rr@{\mskip2mu}} a & b\\ -b & a \end{array}\right].](https://s0.wp.com/latex.php?latex=%5Cnotag++++%5Cleft%5B%5Cbegin%7Barray%7D%7B%40%7B%5Cmskip2mu%7Drr%40%7B%5Cmskip2mu%7D%7D++++++a+%26+b%5C%5C++++++b+%26+c++++%5Cend%7Barray%7D%5Cright%5D%2C+%5Cquad++++%5Cleft%5B%5Cbegin%7Barray%7D%7B%40%7B%7Drr%40%7B%5Cmskip2mu%7D%7D++++++a+%26+b%5C%5C+++++-b+%26+a++++%5Cend%7Barray%7D%5Cright%5D.+&bg=ffffff&fg=222222&s=0&c=20201002)
The first matrix is symmetric. The second matrix is of the form 
![J = \bigl[\begin{smallmatrix}\!\phantom{-}0 & 1\\\!-1 & 0 \end{smallmatrix}\bigr]](https://s0.wp.com/latex.php?latex=J+%3D+%5Cbigl%5B%5Cbegin%7Bsmallmatrix%7D%5C%21%5Cphantom%7B-%7D0+%26+1%5C%5C%5C%21-1+%26+0+%5Cend%7Bsmallmatrix%7D%5Cbigr%5D&bg=ffffff&fg=222222&s=0&c=20201002)


It is natural to ask what the commutator 

In the polar decomposition 


The field of values, also known as the numerical range, is defined for 

The set 
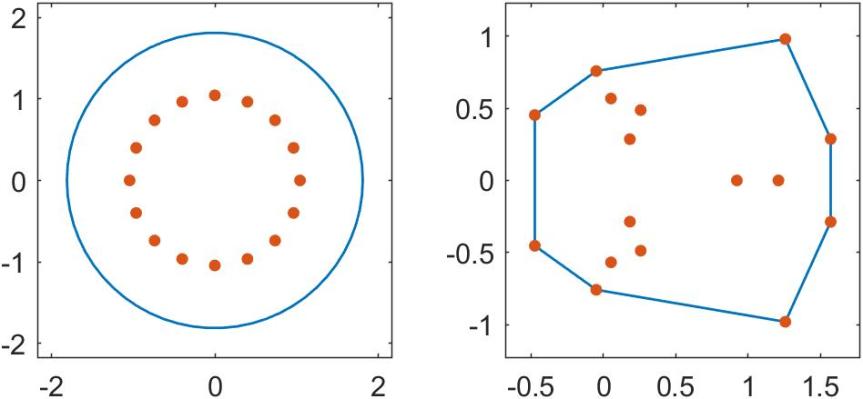
gallery('smoke',16) and that on the right is for the circulant matrix gallery('circul',x) with x constructed as x = randn(16,1); x = x/norm(x).
Measures of Nonnormality
How can we measure the degree of nonnormality of a matrix? Let 






Henrici (1962) derived an upper bound for 

The distance to normality is

This quantity can be computed by an algorithm of Ruhe (1987). It is trivially bounded above by
Normal matrices are a particular class of diagonalizable matrices. For diagonalizable matrices various bounds are available that depend on the condition number of a diagonalizing transformation. Since such a transformation is not unique, we take a diagonalization

Here are some examples of such bounds. We denote by 
- By taking norms in the eigenvalue-eigenvector equation
we obtain
. Taking norms in
. Hence
- If
and its eigenvalues are ordered
, then (Ruhe, 1975)
Note that for
the previous upper bound is sharper.
- For any real
,
- For any function
defined on the spectrum of



For normal 
References
This is a minimal set of references, which contain further useful references within.
- L. Elsner and Kh.D. Ikramov, Normal Matrices: An Update, Linear Algebra Appl 285, 291–303, 1998.
- L. Elsner and M. H. C. Paardekooper, On Measures of Nonnormality of Matrices, Linear Algebra Appl. 92, 107–124, 1987.
- Robert Grone, Charles Johnson, Eduardo Sa, and Henry Wolkowicz, Normal Matrices, Linear Algebra Appl. 87, 213–225, 1987
- Peter Henrici, Bounds for Iterates, Inverses, Spectral Variation and Fields of Values of Non-Normal Matrices, Numer. Math. 4, 24–40, 1962.
- Lajos László, An Attainable Lower Bound for the Best Normal Approximation, SIAM J. Matrix Anal. Appl. 15 (3), 1035–1043, 1994.
- Axel Ruhe, On the Closeness of Eigenvalues and Singular Values Of Almost Normal Matrices, Linear Algebra Appl. 11, 87–94, 1975.
- Axel Ruhe, Closest Normal Matrix Finally Found!, BIT 27, 585–598, 1987.
 , where
, where  is the matrix exponential. Just as in the scalar case, the matrix logarithm is not unique, since if
is the matrix exponential. Just as in the scalar case, the matrix logarithm is not unique, since if  for any integer
for any integer  . However, for matrices the nonuniqueness is complicated by the presence of repeated eigenvalues. For example, the matrix
. However, for matrices the nonuniqueness is complicated by the presence of repeated eigenvalues. For example, the matrix
 identity matrix
identity matrix  for any
for any  , whereas the obvious logarithms are the diagonal matrices
, whereas the obvious logarithms are the diagonal matrices  , for integers
, for integers  ,
,  , and
, and  . Notice that the repeated eigenvalue
. Notice that the repeated eigenvalue  ,
,  , and
, and  in
in  . This is characteristic of nonprimary logarithms, and in some applications such strange logarithms may be required—an example is the embeddability problem for Markov chains.
. This is characteristic of nonprimary logarithms, and in some applications such strange logarithms may be required—an example is the embeddability problem for Markov chains. but not for odd
but not for odd  ,
,![\notag X = \pi\left[\begin{array}{@{}rr@{}} 0 & 1\\ -1 & 0 \end{array}\right]](https://s0.wp.com/latex.php?latex=%5Cnotag++++X+%3D++%5Cpi%5Cleft%5B%5Cbegin%7Barray%7D%7B%40%7B%7Drr%40%7B%7D%7D++++++++++++++0+%26+1%5C%5C++++++++++++++-1+%26+0+++++++++++++%5Cend%7Barray%7D%5Cright%5D+&bg=ffffff&fg=222222&s=0&c=20201002)
 , as does
, as does  for any nonsingular
for any nonsingular  , since
, since  .
. . From this point on we assume that
. From this point on we assume that ![\notag \begin{aligned} \log A &= \int_0^1 (A-I)\bigl[ t(A-I) + I \bigr]^{-1} \,\mathrm{d}t, \\ \log(I+X) &= X - \frac{X^2}{2} + \frac{X^3}{3} - \frac{X^4}{4} + \cdots, \quad \rho(X)<1, \end{aligned}](https://s0.wp.com/latex.php?latex=%5Cnotag+%5Cbegin%7Baligned%7D+++++++%5Clog+A++%26%3D+%5Cint_0%5E1+%28A-I%29%5Cbigl%5B+t%28A-I%29+%2B+I+%5Cbigr%5D%5E%7B-1%7D+%5C%2C%5Cmathrm%7Bd%7Dt%2C+%5C%5C+++++%5Clog%28I%2BX%29+%26%3D+X+-+%5Cfrac%7BX%5E2%7D%7B2%7D+%2B+%5Cfrac%7BX%5E3%7D%7B3%7D++++++++++++++++++++-+%5Cfrac%7BX%5E4%7D%7B4%7D+%2B+%5Ccdots%2C+%5Cquad+%5Crho%28X%29%3C1%2C+%5Cend%7Baligned%7D+&bg=ffffff&fg=222222&s=0&c=20201002)
 . A useful relation is
. A useful relation is  for
for ![\alpha\in[-1,1]](https://s0.wp.com/latex.php?latex=%5Calpha%5Cin%5B-1%2C1%5D&bg=ffffff&fg=222222&s=0&c=20201002) , with important special cases
, with important special cases  and
and  (where the square root is the principal square root). Recurring the latter expression gives, for any positive integer
(where the square root is the principal square root). Recurring the latter expression gives, for any positive integer 
 is small enough that
is small enough that  can be efficiently approximated by Padé approximation. The MATLAB function
can be efficiently approximated by Padé approximation. The MATLAB function  with
with  is a factorization
is a factorization  with
with  orthonormal and
orthonormal and  upper trapezoidal. The
upper trapezoidal. The  factor has the form
factor has the form ![R = \left[\begin{smallmatrix}R_1\\ 0\end{smallmatrix}\right]](https://s0.wp.com/latex.php?latex=R+%3D+%5Cleft%5B%5Cbegin%7Bsmallmatrix%7DR_1%5C%5C+0%5Cend%7Bsmallmatrix%7D%5Cright%5D&bg=ffffff&fg=222222&s=0&c=20201002) , where
, where  is
is ![\notag A = QR = \begin{array}[b]{@{\mskip-20mu}c@{\mskip0mu}c@{\mskip-1mu}c@{}} & \mskip10mu\scriptstyle n & \scriptstyle m-n \\ \mskip15mu \begin{array}{r} \scriptstyle m \end{array}~ & \multicolumn{2}{c}{\mskip-15mu \left[\begin{array}{c@{~}c@{~}} Q_1 & Q_2 \end{array}\right] } \end{array} \mskip-10mu \begin{array}[b]{@{\mskip-25mu}c@{\mskip-20mu}c@{}} \scriptstyle n \\ \multicolumn{1}{c}{ \left[\begin{array}{@{}c@{}} R_1\\ 0 \end{array}\right]} & \mskip-12mu\ \begin{array}{l} \scriptstyle n \\ \scriptstyle m-n \end{array} \end{array} = Q_1 R_1.](https://s0.wp.com/latex.php?latex=%5Cnotag++++A+%3D+QR+++++%3D++++%5Cbegin%7Barray%7D%5Bb%5D%7B%40%7B%5Cmskip-20mu%7Dc%40%7B%5Cmskip0mu%7Dc%40%7B%5Cmskip-1mu%7Dc%40%7B%7D%7D++++%26+%5Cmskip10mu%5Cscriptstyle+n+%26+%5Cscriptstyle+m-n++%5C%5C+++++++%5Cmskip15mu++++++++++%5Cbegin%7Barray%7D%7Br%7D++++++++++++++%5Cscriptstyle+m++++++++++%5Cend%7Barray%7D%7E++++%26+++++++%5Cmulticolumn%7B2%7D%7Bc%7D%7B%5Cmskip-15mu++++++++++%5Cleft%5B%5Cbegin%7Barray%7D%7Bc%40%7B%7E%7Dc%40%7B%7E%7D%7D++++++++++++++++++Q_1+%26+Q_2++++++++++++++++%5Cend%7Barray%7D%5Cright%5D+++++++%7D++++%5Cend%7Barray%7D+%5Cmskip-10mu++++%5Cbegin%7Barray%7D%5Bb%5D%7B%40%7B%5Cmskip-25mu%7Dc%40%7B%5Cmskip-20mu%7Dc%40%7B%7D%7D++++%5Cscriptstyle+n++++%5C%5C++++%5Cmulticolumn%7B1%7D%7Bc%7D%7B++++++++%5Cleft%5B%5Cbegin%7Barray%7D%7B%40%7B%7Dc%40%7B%7D%7D++++++++++++++++++R_1%5C%5C++++++++++++++++++0++++++++++++++%5Cend%7Barray%7D%5Cright%5D%7D++++%26+%5Cmskip-12mu%5C++++++++++%5Cbegin%7Barray%7D%7Bl%7D++++++++++++++%5Cscriptstyle+n+%5C%5C++++++++++++++%5Cscriptstyle+m-n++++++++++%5Cend%7Barray%7D++++%5Cend%7Barray%7D++++%3D+Q_1+R_1.+&bg=ffffff&fg=222222&s=0&c=20201002)
 is the reduced (also called economy-sized, or thin) QR factorization.
is the reduced (also called economy-sized, or thin) QR factorization. is symmetric positive definite. Since
is symmetric positive definite. Since  , we can take
, we can take  . The resulting
. The resulting  has orthonormal columns because
has orthonormal columns because
 and obtain another QR factorization.)
and obtain another QR factorization.) implies
implies  while
while  implies
implies  , so
, so  . Furthermore,
. Furthermore,  gives
gives  , so the columns of
, so the columns of  span the null space of
span the null space of  .
. is not guaranteed to be orthonormal to the working precision. The modified Gram–Schmidt method (a variation of the classical method) is better behaved numerically in that
is not guaranteed to be orthonormal to the working precision. The modified Gram–Schmidt method (a variation of the classical method) is better behaved numerically in that  for some constant
for some constant  , where
, where  is the unit roundoff, so the loss of orthogonality is bounded.
is the unit roundoff, so the loss of orthogonality is bounded. as a product of orthogonal matrices that are chosen to reduce
as a product of orthogonal matrices that are chosen to reduce ![\notag \qquad\qquad\qquad\qquad A^{(k)} = Q_{k-1}^T A = \begin{array}[b]{@{\mskip35mu}c@{\mskip20mu}c@{\mskip-5mu}c@{}c} \scriptstyle k-1 & \scriptstyle 1 & \scriptstyle n-k & \\ \multicolumn{3}{c}{ \left[\begin{array}{c@{\mskip10mu}cc} R_{k-1} & y_k & B_k \\ 0 & z_k & C_k \end{array}\right]} & \mskip-12mu \begin{array}{c} \scriptstyle k-1 \\ \scriptstyle m-k+1 \end{array} \end{array}, \qquad\qquad\qquad\qquad (*)](https://s0.wp.com/latex.php?latex=%5Cnotag+++%5Cqquad%5Cqquad%5Cqquad%5Cqquad++++A%5E%7B%28k%29%7D+%3D+Q_%7Bk-1%7D%5ET+A+%3D++++%5Cbegin%7Barray%7D%5Bb%5D%7B%40%7B%5Cmskip35mu%7Dc%40%7B%5Cmskip20mu%7Dc%40%7B%5Cmskip-5mu%7Dc%40%7B%7Dc%7D++++%5Cscriptstyle+k-1+%26++++%5Cscriptstyle+1+%26++++%5Cscriptstyle+n-k+%26++++%5C%5C++++%5Cmulticolumn%7B3%7D%7Bc%7D%7B++++%5Cleft%5B%5Cbegin%7Barray%7D%7Bc%40%7B%5Cmskip10mu%7Dcc%7D++++R_%7Bk-1%7D+%26+y_k++%26+B_k+%5C%5C++++++++0+++%26+z_k++%26+C_k++++%5Cend%7Barray%7D%5Cright%5D%7D++++%26+%5Cmskip-12mu++++%5Cbegin%7Barray%7D%7Bc%7D++++%5Cscriptstyle+k-1+%5C%5C++++%5Cscriptstyle+m-k%2B1++++%5Cend%7Barray%7D++++%5Cend%7Barray%7D%2C+++%5Cqquad%5Cqquad%5Cqquad%5Cqquad+%28%2A%29+&bg=ffffff&fg=222222&s=0&c=20201002)
 is upper triangular and
is upper triangular and  is a product of Householder transformations or Givens rotations. Working on
is a product of Householder transformations or Givens rotations. Working on  we now apply a Householder transformation or
we now apply a Householder transformation or  Givens rotations in order to zero out the last
Givens rotations in order to zero out the last  and thereby take the matrix one step closer to upper trapezoidal form.
and thereby take the matrix one step closer to upper trapezoidal form. , for some constant
, for some constant  .
. satisfies
satisfies
 .
. . In its basic form, this method is not recommended unless
. In its basic form, this method is not recommended unless  , the column of largest
, the column of largest  , the
, the  then the
then the  th columns of
th columns of  are interchanged. The result is a factorization
are interchanged. The result is a factorization  , where
, where  is a permutation matrix and
is a permutation matrix and 


 nonsingular, and the rank of
nonsingular, and the rank of 
 and
and  ,
,  is of order
is of order  times larger than the smallest singular value for small
times larger than the smallest singular value for small  and
and  is invariant under QR factorization with column pivoting.
is invariant under QR factorization with column pivoting. .
. is rank-revealing. Computing such a permutation is impractical, but heuristic algorithms for producing an approximate rank-revealing factorization are available.
is rank-revealing. Computing such a permutation is impractical, but heuristic algorithms for producing an approximate rank-revealing factorization are available. where
where  is the characteristic polynomial. This statement is not simply the substitution “
is the characteristic polynomial. This statement is not simply the substitution “ ”, which is not valid since
”, which is not valid since  term. Rather, for an
term. Rather, for an 

 Jordan block with eigenvalue
Jordan block with eigenvalue  :
:

 . In general, for an
. In general, for an  Jordan block
Jordan block  with eigenvalue
with eigenvalue  is zero apart from a
is zero apart from a  , and
, and  .
. , where
, where  and each
and each  is an
is an  Jordan block with eigenvalue
Jordan block with eigenvalue  . The characteristic polynomial of
. The characteristic polynomial of  . Note that
. Note that  for all
for all  for any polynomial
for any polynomial  . Then
. Then
 is zero because it contains a factor
is zero because it contains a factor  and this factor is zero, as noted above. Hence
and this factor is zero, as noted above. Hence  and therefore
and therefore  of an
of an  is the transposed matrix of cofactors, where a cofactor is a signed sum of products of
is the transposed matrix of cofactors, where a cofactor is a signed sum of products of  entries of
entries of  . With
. With  , each entry of
, each entry of  can be written
can be written
 ,
,  ,
,  not depending on
not depending on 
 , …,
, …,  gives
gives
 , the second by
, the second by  , and so on, and adding, gives
, and so on, and adding, gives
 is expressible as a linear combination of
is expressible as a linear combination of  ,
, 
 .
. for any
for any  can be expressed as a linear combination of
can be expressed as a linear combination of  can be written
can be written  for some scalars
for some scalars  , …,
, …,  . However, the
. However, the  depend on
depend on  :
:
 .
. then applying the theorem to
then applying the theorem to  , or
, or

 and taking the trace in
and taking the trace in  , leading to
, leading to
 of the characteristic polynomial are typically numerically unstable.
of the characteristic polynomial are typically numerically unstable. for all nonnegative
for all nonnegative  , for all nonnegative
, for all nonnegative  , adding “I have not thought it necessary to undertake the labour of a formal proof of the theorem in the general case of a matrix of any degree.” Hamilton had proved the result for quaternions in 1853. Cayley actually discovered a more general version of the Cayley–Hamilton theorem, which appears in an 1857 letter to Sylvester but not in any of his published work: if the square matrices
, adding “I have not thought it necessary to undertake the labour of a formal proof of the theorem in the general case of a matrix of any degree.” Hamilton had proved the result for quaternions in 1853. Cayley actually discovered a more general version of the Cayley–Hamilton theorem, which appears in an 1857 letter to Sylvester but not in any of his published work: if the square matrices  then
then  .
.