
The two-part minisymposium Bohemian Matrices and Applications, organized by Rob Corless and I, took place at the SIAM Annual Meeting, July 22 and 23, 2021. This page makes available slides from some of the talks.
The minisymposium followed a two-part minisymposium on Bohemian matrices at the 2019 ICIAM meeting in Valencia and a 3-day workshop on Bohemian matrices in Manchester in 2018.
For more on Bohemian matrices see the Bohemian matrices website.
Minisymposium description: Bohemian matrices are matrices with entries drawn from a fixed discrete set of small integers (or some other discrete set). The term is a contraction of BOunded HEight Matrix of Integers. Such matrices arise in many applications, and include 

Putting Skew-Symmetric Tridiagonal Bohemians on the Calendar. Robert M. Corless, Western University, Canada. Abstract. Rob did not use slides but gave his talk using this paper and this Maple worksheet.
Determinants of Normalized Bohemian Upper Hessenberg Matrices. Massimiliano Fasi, Örebro University, Sweden; Jishe Feng, Longdong University, China; Gian Maria Negri Porzio, University of Manchester, United Kingdom. Abstract. Slides.
Experiments on Upper Hessenberg and Toeplitz Bohemians. Eunice Chan, Western University, Canada. Abstract. Slides.
Eigenvalues of Magic Squares and Related Bohemian Matrices. Hariprasad Manjunath Hegde, Indian Institute of Science, Bengaluru, India. Abstract. Slides.
Calculating the 3D Kings Multiplicity Constant. Nicholas Cohen and Neil Calkin, Clemson University, U.S. Abstract. Slides.
Bohemian Inners Inverses: A First Step Toward Bohemian Generalized Inverses. Laureano Gonzalez-Vega, Universidad de Cantabria, Spain; Juan Rafael Sendra, Universidad Alcalá de Henares, Spain; Juana Sendra Pons, Universidad Politécnica de Madrid, Spain. Abstract. Slides.
Recent Progress in the Rational Factorisation of Integer Matrices. Matthew Lettington, Cardiff University, United Kingdom. Abstract. Slides.
Which Columns are Independent? Why does Row Rank = Column Rank? Gilbert Strang, Massachusetts Institute of Technology, U.S. Abstract. Slides.
Bohemian Matrices: the Symbolic Computation Approach. Juana Sendra, Universidad Autónoma de Madrid, Spain; Laureano González-Vega, Universidad de Estudios Financieros en Madrid, Spain; Juan Rafael Sendra, Universidad Alcalá de Henares, Spain. Abstract. Slides.
 is totally positive if every minor is positive. It is totally nonnegative if every minor is nonnegative. These definitions require, in particular, that all the matrix elements must be nonnegative or positive, as must
is totally positive if every minor is positive. It is totally nonnegative if every minor is nonnegative. These definitions require, in particular, that all the matrix elements must be nonnegative or positive, as must  .
. are totally nonnegative then so is
are totally nonnegative then so is  .
.![\alpha = [\alpha_1,\alpha_2,\dots,\alpha_k]](https://s0.wp.com/latex.php?latex=%5Calpha+%3D+%5B%5Calpha_1%2C%5Calpha_2%2C%5Cdots%2C%5Calpha_k%5D&bg=ffffff&fg=222222&s=0&c=20201002) is an index vector of order
is an index vector of order  if its components are integers from the set
if its components are integers from the set  satisfying
satisfying  . If
. If  and
and  are index vectors of order
are index vectors of order  , respectively, then
, respectively, then  denotes the
denotes the  matrix with (
matrix with ( ) element
) element  .
. ,
,  , and
, and  . If
. If  then
then
 of order
of order  , (1) reduces to the well-known relation
, (1) reduces to the well-known relation  , while when
, while when  , (1) reduces to the definition of matrix multiplication.
, (1) reduces to the definition of matrix multiplication.
 comprises the indices not in
comprises the indices not in  :
:
 , with
, with  . The Hilbert matrix is a particular case of a Cauchy matrix
. The Hilbert matrix is a particular case of a Cauchy matrix  , with
, with  for given vectors
for given vectors  . A Cauchy matrix is totally positive if
. A Cauchy matrix is totally positive if  and
and  , which follows from the formula
, which follows from the formula

 satisfy
satisfy 
 is defined by
is defined by
 (see the section below on bidiagonal factorizations).
(see the section below on bidiagonal factorizations). with off-diagonal elements given by
with off-diagonal elements given by  with
with  , illustrated by
, illustrated by
![A([1,2],[2,3]) = \bigl[\begin{smallmatrix} \theta & \theta \\ 1 & \theta \end{smallmatrix}\bigr]](https://s0.wp.com/latex.php?latex=A%28%5B1%2C2%5D%2C%5B2%2C3%5D%29+%3D++++%5Cbigl%5B%5Cbegin%7Bsmallmatrix%7D++++%5Ctheta+%26+%5Ctheta+%5C%5C++++1++++++%26+%5Ctheta++++%5Cend%7Bsmallmatrix%7D%5Cbigr%5D+&bg=ffffff&fg=222222&s=0&c=20201002) has nonpositive determinant. However, the
has nonpositive determinant. However, the  , with
, with 
 with all elements
with all elements  on and below the superdiagonal, illustrated for
on and below the superdiagonal, illustrated for  by
by
 zero eigenvalues, which appear in a single Jordan block, and its largest eigenvalue is
zero eigenvalues, which appear in a single Jordan block, and its largest eigenvalue is  . In MATLAB, this matrix can be generated by
. In MATLAB, this matrix can be generated by  bidiagonal matrix factorized into a product of elementary nonnegative bidiagonal matrices (nonnegative means that the elements of the matrix are nonnegative):
bidiagonal matrix factorized into a product of elementary nonnegative bidiagonal matrices (nonnegative means that the elements of the matrix are nonnegative):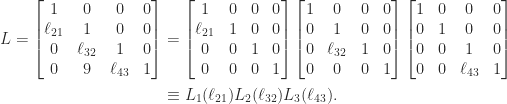
 ,
,  , and
, and  are totally nonnegative, so
are totally nonnegative, so  is totally nonnegative by Theorem 1. With
is totally nonnegative by Theorem 1. With  , we have
, we have
 nonnegative bidiagonal matrix is totally nonnegative.
nonnegative bidiagonal matrix is totally nonnegative. , where
, where
 denotes the submatrix of
denotes the submatrix of  and column
and column  . If
. If  has a checkerboard (alternating) sign pattern. Indeed, we can write
has a checkerboard (alternating) sign pattern. Indeed, we can write  , where
, where  and
and  has nonnegative elements, and in fact it can be shown that
has nonnegative elements, and in fact it can be shown that  is irreducible if there does not exist a permutation matrix
is irreducible if there does not exist a permutation matrix  such that
such that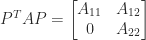
 and
and  are square, nonempty submatrices.
are square, nonempty submatrices. . It is known that the eigenvector
. It is known that the eigenvector  associated with
associated with  has
has  sign changes, that is,
sign changes, that is,  and (
and ( have opposite signs for
have opposite signs for  (any zero elements are deleted before counting sign changes). Note that for
(any zero elements are deleted before counting sign changes). Note that for  , we already know from Perron–Frobenius theory that there is a positive eigenvector
, we already know from Perron–Frobenius theory that there is a positive eigenvector  . This result is illustrated by the Pascal matrix above:
. This result is illustrated by the Pascal matrix above: is totally positive for some positive integer
is totally positive for some positive integer 
 totally nonnegative and the
totally nonnegative and the  .
. for
for  , which guarantees the existence of an LU factorization. That the elements of
, which guarantees the existence of an LU factorization. That the elements of  and computes
and computes  , since
, since  . Thus
. Thus  ,
,  . For
. For  ,
,  ; for
; for  ,
,  . Thus
. Thus  for all
for all  and hence
and hence  . But
. But  , so
, so  .
. the computed factors
the computed factors  and
and  will have nonnegative elements and so from the standard backward error result for LU factorization,
will have nonnegative elements and so from the standard backward error result for LU factorization,

 and hence
and hence

 is a diagonal matrix with positive diagonal entries and
is a diagonal matrix with positive diagonal entries and  and
and  are unit lower and unit upper bidiagonal matrices, respectively, with the first
are unit lower and unit upper bidiagonal matrices, respectively, with the first  entries along the subdiagonal of
entries along the subdiagonal of  zero and the rest nonnegative.
zero and the rest nonnegative. subdiagonal entries of
subdiagonal entries of  principal minors (ones based on submatrices centred on the diagonal) and
principal minors (ones based on submatrices centred on the diagonal) and  minors in total. However, it is not necessary to check all these minors to test for total positivity.
minors in total. However, it is not necessary to check all these minors to test for total positivity. for all index vectors
for all index vectors ![[1,2,\dots,k]](https://s0.wp.com/latex.php?latex=%5B1%2C2%2C%5Cdots%2Ck%5D&bg=ffffff&fg=222222&s=0&c=20201002) and the entries of the other are
and the entries of the other are  minors need to be tested. Gasca and Peña have also show that total nonnegativity can be tested by checking about
minors need to be tested. Gasca and Peña have also show that total nonnegativity can be tested by checking about  minors. A more efficient way to test for total nonnegativity is to compute the factorization in Theorem 6 and check the signs of the entries.
minors. A more efficient way to test for total nonnegativity is to compute the factorization in Theorem 6 and check the signs of the entries. the spectral radius of
the spectral radius of  such that
such that  .
. ,
, ,
, for any eigenvalue
for any eigenvalue  with
with  .
. , is called the Perron vector.
, is called the Perron vector. matrices. Here are some interesting cases.
matrices. Here are some interesting cases.![A = \bigl[\begin{smallmatrix}0 & 1 \\ 0 & 0 \end{smallmatrix}\bigr]](https://s0.wp.com/latex.php?latex=A+%3D+%5Cbigl%5B%5Cbegin%7Bsmallmatrix%7D0+%26+1+%5C%5C+0+%26+0+%5Cend%7Bsmallmatrix%7D%5Cbigr%5D&bg=ffffff&fg=222222&s=0&c=20201002) : Theorem 1 says that
: Theorem 1 says that  is an eigenvalue and and that it has a nonnegative eigenvector. Indeed
is an eigenvalue and and that it has a nonnegative eigenvector. Indeed ![[1~0]^T](https://s0.wp.com/latex.php?latex=%5B1%7E0%5D%5ET&bg=ffffff&fg=222222&s=0&c=20201002) is an eigenvector. Note that
is an eigenvector. Note that  is a repeated eigenvalue.
is a repeated eigenvalue.![A = \bigl[\begin{smallmatrix}0 & 1 \\ 1 & 0 \end{smallmatrix}\bigr]](https://s0.wp.com/latex.php?latex=A+%3D+%5Cbigl%5B%5Cbegin%7Bsmallmatrix%7D0+%26+1+%5C%5C+1+%26+0+%5Cend%7Bsmallmatrix%7D%5Cbigr%5D&bg=ffffff&fg=222222&s=0&c=20201002) :
:  and
and ![[1~1]^T/2](https://s0.wp.com/latex.php?latex=%5B1%7E1%5D%5ET%2F2&bg=ffffff&fg=222222&s=0&c=20201002) is the Perron vector for the Perron root
is the Perron vector for the Perron root ![A = \bigl[\begin{smallmatrix}1 & 1 \\ 1 & 1 \end{smallmatrix}\bigr]](https://s0.wp.com/latex.php?latex=A+%3D+%5Cbigl%5B%5Cbegin%7Bsmallmatrix%7D1+%26+1+%5C%5C+1+%26+1+%5Cend%7Bsmallmatrix%7D%5Cbigr%5D&bg=ffffff&fg=222222&s=0&c=20201002) : Theorem 3 says that
: Theorem 3 says that  is an eigenvalue with positive eigenvector and that the other eigenvalue has modulus less than
is an eigenvalue with positive eigenvector and that the other eigenvalue has modulus less than  . Indeed the eigenvalues are the Perron root
. Indeed the eigenvalues are the Perron root 
 is an eigenvalue of
is an eigenvalue of ![[1~1~1]^T/3](https://s0.wp.com/latex.php?latex=%5B1%7E1%7E1%5D%5ET%2F3&bg=ffffff&fg=222222&s=0&c=20201002) . Two of the eigenvalues are complex, however, and all three eigenvalues have modulus 1, as they must because
. Two of the eigenvalues are complex, however, and all three eigenvalues have modulus 1, as they must because  , where
, where ![e = [1,1,\dots,1]^T](https://s0.wp.com/latex.php?latex=e+%3D+%5B1%2C1%2C%5Cdots%2C1%5D%5ET&bg=ffffff&fg=222222&s=0&c=20201002) , which means that
, which means that  . Since
. Since  for any norm, by taking the
for any norm, by taking the  -norm we conclude that
-norm we conclude that  is the Perron vector of
is the Perron vector of  then
then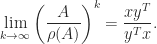
 (since
(since  ).
). . If
. If  and Theorem 4 says that
and Theorem 4 says that  . We illustrate this result in MATLAB using a scaled magic square matrix.
. We illustrate this result in MATLAB using a scaled magic square matrix.
 , as
, as  is the rank-
is the rank- , and it is also rank-
, and it is also rank- , as in this case every column is a multiple of the vector with alternating elements
, as in this case every column is a multiple of the vector with alternating elements  . For
. For  ,
,  is nonsingular and the inverse is the tridiagonal (but not Toeplitz) matrix
is nonsingular and the inverse is the tridiagonal (but not Toeplitz) matrix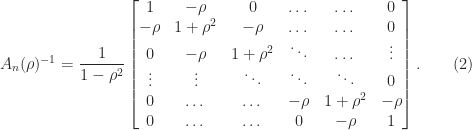
 ,
,  is positive definite, since every leading principal submatrix has positive determinant, as can also be seen by noting that the inverse is diagonally dominant with positive diagonal, so that
is positive definite, since every leading principal submatrix has positive determinant, as can also be seen by noting that the inverse is diagonally dominant with positive diagonal, so that  is positive definite and hence
is positive definite and hence  ,
,  in this range.
in this range. ,
,  , we know that
, we know that  with
with 

 for
for  .
. continues to hold with
continues to hold with  replaced by
replaced by  .
.