Given a symmetric matrix and a nonnegative number 
Distance can be measured in any norm, but the most common choice is the Frobenius norm, 
This problem occurs in a very wide range of applications. A typical scenario is that a covariance matrix is approximated in some way that does not guarantee positive semidefinitess, for example by treating blocks of the matrix independently. In machine learning, some methods use indefinite kernels and these can require an indefinite similarity matrix to be replaced by a semidefinite one. When 
The following theorem gives the solution to the problem for the Frobenius norm.
Theorem (Cheng and Higham, 1998).
Let the symmetric matrix
have the spectral decomposition
and let
. The unique matrix with smallest eigenvalue at least
in the Frobenius norm is given by

The theorem says that there is a unique nearest matrix and that is has the same eigenvectors as 





One can pose the same nearness problem for nonsymmetric 

For the 



Theorem (Halmos, 1972).
The
where
and a nearest matrix is



When 

Clearly, 


The Frobenius norm solution 

Halmos’s theorem simplifies the computation of 







Example
For a numerical example (in MATLAB), we take the Jordan block
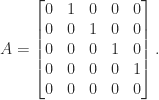
The symmetric part of 
>> A = gallery('jordbloc',5,0); As = sym(A); eig_B = eig((As+As')/2)'
eig_B =
[-1/2, 0, 1/2, -3^(1/2)/2, 3^(1/2)/2]
>> double(eig_B)
ans =
-5.0000e-01 0 5.0000e-01 -8.6603e-01 8.6603e-01
The nearest symmetric positive semidefinite matrix to
B = (A + A')/2; [Q,D] = eig(B); d = diag(D); X_F = Q*diag(max(d,0))*Q';
We can improve this code by using the implicit expansion feature of MATLAB to avoid forming a diagonal matrix. Since the computed result is not exactly symmetric because of rounding errors, we also need to replace it by the nearest symmetric matrix:
[Q,d] = eig(B,'vector'); X_F = Q*(max(d,0).*Q'); X_F = (X_F + X_F')/2;
We obtain
X_F = 1.972e-01 2.500e-01 1.443e-01 -4.163e-17 -5.283e-02 2.500e-01 3.415e-01 2.500e-01 9.151e-02 -1.665e-16 1.443e-01 2.500e-01 2.887e-01 2.500e-01 1.443e-01 -4.163e-17 9.151e-02 2.500e-01 3.415e-01 2.500e-01 -5.283e-02 -1.665e-16 1.443e-01 2.500e-01 1.972e-01
which has eigenvalues
-3.517e-17 7.246e-17 9.519e-17 5.000e-01 8.660e-01
Notice that the three eigenvalues that would be zero in exact arithmetic are of order the unit roundoff. A nearest matrix in the
X_2 = 8.336e-01 5.000e-01 1.711e-01 0.000e+00 -1.756e-02 5.000e-01 6.625e-01 5.000e-01 1.887e-01 0.000e+00 1.711e-01 5.000e-01 6.450e-01 5.000e-01 1.711e-01 0.000e+00 1.887e-01 5.000e-01 6.625e-01 5.000e-01 -1.756e-02 0.000e+00 1.711e-01 5.000e-01 8.336e-01
and its eigenvalues are
-7.608e-17 1.281e-01 5.436e-01 1.197e+00 1.769e+00
The distances are

References
This is a minimal set of references, which contain further useful references within.
- Richard Bouldin, Positive Approximants, Trans. Amer. Math. Soc. 177, 391–403, 1973.
- Sheung Hun Cheng and Nicholas Higham, A Modified Cholesky Algorithm Based on a Symmetric Indefinite Factorization, SIAM J. Matrix Anal. Appl. 19(4), 1097–1110, 1998.
- Nicholas J. Higham, Computing a Nearest Symmetric Positive Semidefinite Matrix, Linear Algebra Appl. 103, 103-118, 1988
- Paul R. Halmos, Positive Approximants of Operators, Indiana Univ. Math. J. 21, 951–960, 1972.
Related Blog Posts
- What Is a Symmetric Positive Definite Matrix? (2020)
- What Is the Nearest Symmetric Matrix? (2020)
- What Is the Polar Decomposition? (2020)
This article is part of the “What Is” series, available from https://nhigham.com/category/what-is and in PDF form from the GitHub repository https://github.com/higham/what-is.
 . Is this the best choice?
. Is this the best choice? is minimized over symmetric
is minimized over symmetric  for all unitary
for all unitary  . Such a norm depends only on the singular values of
. Such a norm depends only on the singular values of  since
since  have the same singular values. The most important examples of unitarily invariant norms are the
have the same singular values. The most important examples of unitarily invariant norms are the  is optimal is simple. For any symmetric
is optimal is simple. For any symmetric  ,
,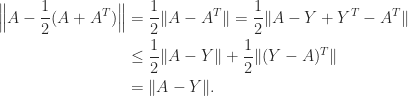


 are the symmetric part and the skew-symmetric part of
are the symmetric part and the skew-symmetric part of  for symmetric
for symmetric  and skew-symmetric
and skew-symmetric  . For the
. For the 
 , and
, and  for any
for any  such that
such that  .
. is the nearest Hermitian matrix to
is the nearest Hermitian matrix to  is the nearest skew-Hermitian matrix to
is the nearest skew-Hermitian matrix to  -vector
-vector  and returns the vector
and returns the vector  with elements given by
with elements given by
 and
and  , the softmax function is often used to convert a vector
, the softmax function is often used to convert a vector 
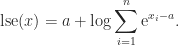
 is the natural logarithm, that is,
is the natural logarithm, that is,  .
. . Note that they are constant on lines
. Note that they are constant on lines  , as shown by the contours.
, as shown by the contours.
 by rewriting it as the exponential of
by rewriting it as the exponential of  and moving it into the numerator, is
and moving it into the numerator, is
 is not recommended, because of the possibility of overflow. Overflow can be avoided in
is not recommended, because of the possibility of overflow. Overflow can be avoided in 
 . It can be shown that computing softmax via this formula is numerically reliable. The shifted version of
. It can be shown that computing softmax via this formula is numerically reliable. The shifted version of  ) is preferred.
) is preferred.
 function,
function, 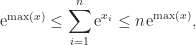

 for
for 
![x = [0~t]^T](https://s0.wp.com/latex.php?latex=x+%3D+%5B0%7Et%5D%5ET&bg=ffffff&fg=222222&s=0&c=20201002) , we obtain the function
, we obtain the function  , which is known as the softplus function in machine learning. The softplus function approximates the ReLU (rectified linear unit) activation function
, which is known as the softplus function in machine learning. The softplus function approximates the ReLU (rectified linear unit) activation function  and satisfies, by
and satisfies, by 
 , in general, we do (trivially) have
, in general, we do (trivially) have  , and more generally
, and more generally  .
. .
. overflows for
overflows for  ,
,  , and
, and  in IEEE half, single, and double precision arithmetic, respectively. Overflow can be avoided by writing
in IEEE half, single, and double precision arithmetic, respectively. Overflow can be avoided by writing
 , so that all exponentiations are of nonpositive numbers and therefore overflow is avoided. Any underflows are harmless. A refinement is to write
, so that all exponentiations are of nonpositive numbers and therefore overflow is avoided. Any underflows are harmless. A refinement is to write
 (if there is more than one such
(if there is more than one such  , we can take any of them). Here,
, we can take any of them). Here,  is a function provided in MATLAB and various other languages that accurately evaluates
is a function provided in MATLAB and various other languages that accurately evaluates  even when
even when  would suffer a loss of precision if it was explicitly computed.
would suffer a loss of precision if it was explicitly computed. the shifted formula
the shifted formula 