A condition number of a problem measures the sensitivity of the solution to small perturbations in the input data. The condition number depends on the problem and the input data, on the norm used to measure size, and on whether perturbations are measured in an absolute or a relative sense. The problem is defined by a function, which may be known explicitly or may be only implicitly defined (as when the problem is to solve an equation).
The most well known example of a condition number is the condition number of a nonsingular square matrix 







It is easy to see that 

A general definition of (relative) condition number, for a function 


Taking a small, nonzero

for small 

An explicit expression for 

We give two examples.
- If
, so
. Hence, for example,
.
- If
is a simple (non-repeated) root of the polynomial
then the data is the vector of coefficients
. It can be shown that the condition number of the root
-norm,

A general theory of condition numbers was developed by Rice (1966).
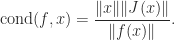
A problem is said to be well conditioned if the condition number is small and ill conditioned if the condition number is large. The meaning of “small” and “large” depends on the problem and the context. This diagram illustrates a well-conditioned function 
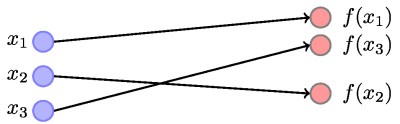
The next diagram depicts an ill-conditioned function 

Here are a few key points about condition numbers.
- Even though an explicit expression may be available for it, computing
, so a lot of research has focused on obtaining inexpensive estimates of the condition number or bounds for it.
- While
.
- For a range of functions that includes the matrix inverse, matrix eigenvalues, and a root of a polynomial, it is known that the condition number is the reciprocal of the relative distance to the nearest singular problem (one with an infinite condition number).
- As the condition number is itself a function, one can ask: What is the condition number of the condition number? For a variety of problems, including those mentioned in the previous point, the condition number of the condition number is (approximately) the condition number!
References
This is a minimal set of references, which contain further useful references within.
- James W. Demmel, On Condition numbers and the distance to the nearest ill-posed problem, Numer. Math. 51, 251–289, 1987.
- Desmond J.Higham, Condition numbers and their condition numbers, Linear Algebra Appl. 214, 193–213, 1995.
- Nicholas J. Higham, Accuracy and Stability of Numerical Algorithms, second edition, Society for Industrial and Applied Mathematics, Philadelphia, PA, USA, 2002.
- Nicholas J. Higham, Functions of Matrices: Theory and Computation, Society for Industrial and Applied Mathematics, Philadelphia, PA, USA, 2008. (Chapter 3).
- Nicholas J. Higham and Samuel D. Relton, Higher order Fréchet derivatives of matrix functions and the level-
condition number, SIAM J. Matrix Anal. Appl. 35(3), 1019–1037, 2014.
- John R. Rice, A theory of condition, SIAM J. Numer. Anal. 3(2), 287–310, 1966.
Related Blog Posts
This article is part of the “What Is” series, available from https://nhigham.com/category/what-is and in PDF form from the GitHub repository https://github.com/higham/what-is.

Thank you for your “What is” blog.
As far as I understand, the usual way to compute the condition number for the matrix A is to take the ratio of the largest to the smallest singular value of A. How is this related to “the reciprocal of the relative distance to the nearest singular problem”?
One more question: if A is the diagonal matrix with 1 and 1e-10 on its diagonal, A’s condition number is 1e10, but the bound on cond(f,x) way overestimates the error computing the solution of Ax=b. Can you comment on whether there exists a tighter estimate of the sensitivity to perturbations?
What you’re referring to is the matrix condition number with respect to inversion for the 2-norm. The reciprocal of that is the relative distance in the 2-norm to the nearest singular matrix.
On the second point, componentwise perturbaton theory and componentwise condition numbers handle this. See Chapter 7 of my book “Accuracy and Stability of Numerical Algorithms”.
What is the nearest singular matrix of [1 0; 0 1/2]? Is there an explicit formula for its computation?
Dear Sir!
Thank you so much for your blog. Using the condition number cond$(f,x)$ of the function $f$ at $x$ , we can find the bound for relative forward error $\frac{\|f(x+\Delta x)-f(x)\|}{\|f(x)\|}$ if the backward error $\Delta x$ belongs to some neighborhood $N(x)$ of $x$. In genearl we don’t know the size of $N(x)$. Let $\Delta x$ be a backward error of an approximated solution $f(x+\Delta x)$. How can one check that $\Delta x$ belongs to $N(x)$ or not ?
Thank you,
Kannan R.
his isn’t normally a problem. If the backward error is so large that a perturbation expansion is not valid then that usually means we have a very poor approximate solution. In any case, there is often a computable expression for \Delta x and so we can check its size