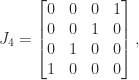
A symmetric indefinite matrix 




A neat way to express the indefinitess is that there exist vectors 

A symmetric indefinite matrix has both positive and negative eigenvalues and in some sense is a typical symmetric matrix. For example, a random symmetric matrix is usually indefinite:
>> rng(3); B = rand(4); A = B + B'; eig(A)' ans = -8.9486e-01 -6.8664e-02 1.1795e+00 3.9197e+00
In general it is difficult to tell if a symmetric matrix is indefinite or definite, but there is one easy-to-spot sufficient condition for indefinitess: if the matrix has a zero diagonal element that has a nonzero element in its row then it is indefinite. Indeed if 





An example of a symmetric indefinite matrix is a saddle point matrix, which has the block 

where 




which has eigenvalues 


>> A = full(gallery('tridiag',5,1,0,1)), eig(sym(A))'
A =
0 1 0 0 0
1 0 1 0 0
0 1 0 1 0
0 0 1 0 1
0 0 0 1 0
ans =
[-1, 0, 1, 3^(1/2), -3^(1/2)]
How can we exploit symmetry in solving a linear system 




The way round this is to allow 





MATLAB implements ldl function. Here is an example using Anymatrix:
>> A = anymatrix('core/blockhouse',4), [L,D,P] = ldl(A), eigA = eig(A)'
A =
-4.0000e-01 -8.0000e-01 -2.0000e-01 4.0000e-01
-8.0000e-01 4.0000e-01 -4.0000e-01 -2.0000e-01
-2.0000e-01 -4.0000e-01 4.0000e-01 -8.0000e-01
4.0000e-01 -2.0000e-01 -8.0000e-01 -4.0000e-01
L =
1.0000e+00 0 0 0
0 1.0000e+00 0 0
5.0000e-01 -8.3267e-17 1.0000e+00 0
-2.2204e-16 -5.0000e-01 0 1.0000e+00
D =
-4.0000e-01 -8.0000e-01 0 0
-8.0000e-01 4.0000e-01 0 0
0 0 5.0000e-01 -1.0000e+00
0 0 -1.0000e+00 -5.0000e-01
P =
1 0 0 0
0 1 0 0
0 0 1 0
0 0 0 1
eigA =
-1.0000e+00 -1.0000e+00 1.0000e+00 1.0000e+00
Notice the
References
- Cleve Ashcraft, Roger Grimes, and John Lewis, Accurate Symmetric Indefinite Linear Equation Solvers, SIAM J. Matrix Anal. Appl. 20, 513–561, 1998.
- Nicholas J. Higham and Mantas Mikaitis, Anymatrix: An Extendable MATLAB Matrix Collection, Numer. Algorithms, 90:3, 1175–1196, 2021.
Related Blog Posts
- What Is a Modified Cholesky Factorization? (2020)
- What Is a Symmetric Positive Definite Matrix? (2020)
This article is part of the “What Is” series, available from https://nhigham.com/category/what-is and in PDF form from the GitHub repository https://github.com/higham/what-is.
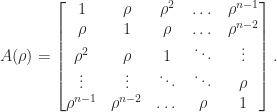
 is a Toeplitz matrix if
is a Toeplitz matrix if  for
for  parameters
parameters  . A Toeplitz matrix has constant diagonals. For
. A Toeplitz matrix has constant diagonals. For  :
: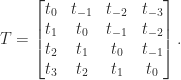
 .
. can be solved in less than the
can be solved in less than the  flops that would be required by LU factorization. Indeed methods are available that require only
flops that would be required by LU factorization. Indeed methods are available that require only  flops; see Golub and Van Loan (2013) for details.
flops; see Golub and Van Loan (2013) for details.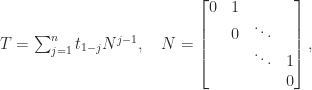
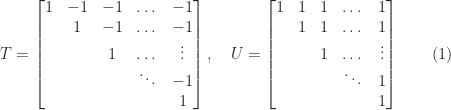
 is upper bidiagonal with a superdiagonal of ones and
is upper bidiagonal with a superdiagonal of ones and  . It follows that the product of two upper triangular Toeplitz matrices is again upper triangular Toeplitz, upper triangular Toeplitz matrices commute, and
. It follows that the product of two upper triangular Toeplitz matrices is again upper triangular Toeplitz, upper triangular Toeplitz matrices commute, and  is also an upper triangular Toeplitz matrix (assuming
is also an upper triangular Toeplitz matrix (assuming  is nonzero, so that
is nonzero, so that  is nonsingular).
is nonsingular).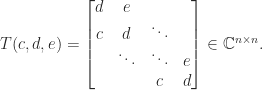
 are
are
 equations in
equations in  , where
, where  is the matrix inverse. What is not always emphasized is that there are very few circumstances in which one should compute
is the matrix inverse. What is not always emphasized is that there are very few circumstances in which one should compute  ) system
) system  by computing
by computing  , but rather would carry out a division
, but rather would carry out a division  . In the
. In the  , where
, where  matrix with
matrix with  , satisfies the normal equations
, satisfies the normal equations  . It is therefore natural to form the symmetric positive definite matrix
. It is therefore natural to form the symmetric positive definite matrix  and solve the normal equations by Cholesky factorization. While fast, this method is numerically unstable when
and solve the normal equations by Cholesky factorization. While fast, this method is numerically unstable when 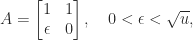
 is the unit roundoff of the floating point arithmetic, then
is the unit roundoff of the floating point arithmetic, then
 , in floating-point arithmetic
, in floating-point arithmetic  rounds to
rounds to 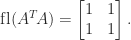
 has been lost.
has been lost. , and in general the cost of the evaluation of a product depends on where one puts the parentheses. One order may be much superior to others, so one should not simply evaluate the product in a fixed left-right or right-left order. For example, if
, and in general the cost of the evaluation of a product depends on where one puts the parentheses. One order may be much superior to others, so one should not simply evaluate the product in a fixed left-right or right-left order. For example, if  are
are  can be evaluated as
can be evaluated as : a vector outer product followed by a matrix–vector product, costing
: a vector outer product followed by a matrix–vector product, costing  : a vector scalar product followed by a vector scaling, costing just
: a vector scalar product followed by a vector scaling, costing just  operations.
operations. in order to minimize the operation count is a
in order to minimize the operation count is a  ,
, for all
for all  ,
, factor is returned in the first argument, and it can be used to compute a direction of negative curvature (as needed in optimization), for example.
factor is returned in the first argument, and it can be used to compute a direction of negative curvature (as needed in optimization), for example. that exploit the block structure and possible sparsity in
that exploit the block structure and possible sparsity in  . A second example is a circulant matrix
. A second example is a circulant matrix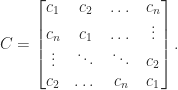
 in
in  operations, rather than the
operations, rather than the  indicates a matrix that is nearly singular. However, the size of
indicates a matrix that is nearly singular. However, the size of  we can achieve any value for the determinant by multiplying by a scalar
we can achieve any value for the determinant by multiplying by a scalar  , yet
, yet  is no more or less nearly singular than
is no more or less nearly singular than  .
.
 , yet
, yet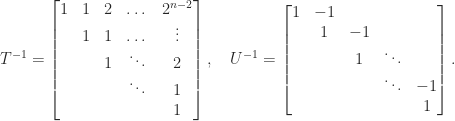
 element of
element of  then the matrix becomes singular! By contrast,
then the matrix becomes singular! By contrast,  is always very well conditioned. The determinant cannot distinguish between the ill-conditioned
is always very well conditioned. The determinant cannot distinguish between the ill-conditioned  for all
for all  , where the
, where the  are the eigenvalue of
are the eigenvalue of  , it follows that the matrix condition number
, it follows that the matrix condition number  is bounded below by the ratio of largest to smallest eigenvalue in absolute value, that is,
is bounded below by the ratio of largest to smallest eigenvalue in absolute value, that is,

 is a singular value decomposition (SVD), with
is a singular value decomposition (SVD), with  orthogonal and
orthogonal and  ,
,  . If
. If  and
and  are the same, but in general the eigenvalues
are the same, but in general the eigenvalues  can be very different.
can be very different.