The spectral radius 



For Hermitian matrices (or more generally normal matrices, those satisfying 


Two classes of matrices for which the spectral radius is known are as follows.
- Unitary matrices (
): these have all their eigenvalues on the unit circle and so
.
- Nilpotent matrices (
for some positive integer
): such matrices have only zero eigenvalues, so
, even though
can be arbitrarily large.
The spectral radius of
Bounds
The spectral radius is bounded above by any consistent matrix norm (one satisfying 

Theorem 1. For any

However, the spectral radius is not a norm and it can be zero when the 

Limit of Norms of Powers
The spectral radius can be expressed as a limit of norms of matrix powers.
Theorem 2 (Gelfand). For
.
The theorem implies that for large enough 


Spectral Radius of a Product
Little can be said about the spectral radius of a product of two matrices. The example

shows that we can have 


we have 
Condition Number Lower Bound
For a nonsingular matrix 

This bound can be very weak for nonnormal matrices.
Power Boundedness
In many situations we wish to know whether the powers of a matrix converge to zero. The spectral radius gives a necessary and sufficient condition for convergence.
Theorem 3. For
as
if and only if
.
The proof of Theorem 3 is straightforward if
Computing the Spectral Radius
Suppose 



In this pseudocode, norm(x) denotes the x.
Choose n-vector q_0 such that norm(q_0) = 1.
for k=1,2,...
z_k = A q_{k-1} % Apply A.
q_k = z_k / norm(z_k) % Normalize.
mu_k = q_k^*Aq_k % Rayleigh quotient.
end
The normalization is to avoid overflow and underflow and the 
If 
Here is an example where the power method converges quickly, thanks to the substantial ratio of 
>> rng(1); A = rand(4); eig_abs = abs(eig(A)), q = rand(4,1);
>> for k = 1:5, q = A*q; q = q/norm(q); mu = q'*A*q;
>> fprintf('%1.0f %7.4e\n',k,mu)
>> end
eig_abs =
1.3567e+00
2.0898e-01
2.5642e-01
1.9492e-01
1 1.4068e+00
2 1.3559e+00
3 1.3580e+00
4 1.3567e+00
5 1.3567e+00
Nonnegative Matrices
For real matrices with nonnegative elements, much more is known about the spectral radius. Perron–Frobenius theory says that if 


rand function, which produces random matrices with elements on 
>> rng(1); A = rand(4); e = sort(eig(A)) e = -2.0898e-01 1.9492e-01 2.5642e-01 1.3567e+00
If 
![e = [1,1,\dots,1]^T](https://s0.wp.com/latex.php?latex=e+%3D+%5B1%2C1%2C%5Cdots%2C1%5D%5ET&bg=ffffff&fg=222222&s=0&c=20201002)


References
- Shmuel Friedland, Revisiting Matrix Squaring, Linear Algebra Appl., 154–156, 59-63, 1991.
- J. H. Wilkinson, The Algebraic Eigenvalue Problem, Oxford University Press, 1965, pp.~615–617.
Related Blog Posts
This article is part of the “What Is” series, available from https://nhigham.com/index-of-what-is-articles/ and in PDF form from the GitHub repository https://github.com/higham/what-is.
 upper Hessenberg matrix
upper Hessenberg matrix  has the property that
has the property that  for
for  . For
. For  , the structure is
, the structure is 
 flops. For example, the first stage of LU factorization needs to eliminate just one element, by adding a multiple of row
flops. For example, the first stage of LU factorization needs to eliminate just one element, by adding a multiple of row  ):
): 
 for all
for all  , then
, then  for any
for any  , which means that there is one linearly independent eigenvector associated with each eigenvalue of
, which means that there is one linearly independent eigenvector associated with each eigenvalue of  real parameters (the Schur parametrization), which are essentially the angles in the Givens QR factorization (note that in the QR factorization
real parameters (the Schur parametrization), which are essentially the angles in the Givens QR factorization (note that in the QR factorization  ,
,  is triangular and unitary and hence diagonal). The MATLAB function
is triangular and unitary and hence diagonal). The MATLAB function  . For
. For  :
: 
 of
of  is an invariant subspace for
is an invariant subspace for  if
if  , that is, if
, that is, if  implies
implies  .
.  and
and  is an invariant subspace of
is an invariant subspace of  implies
implies  .
. is a
is a  , where
, where 
 and a two-dimensional invariant subspace
and a two-dimensional invariant subspace  , where
, where  denotes the
denotes the  be linearly independent vectors. Then
be linearly independent vectors. Then  is an invariant subspace of
is an invariant subspace of  for
for  . Writing
. Writing ![X = [x_1,x_2,\dots,x_p]\in\mathbb{C}^{n \times p}](https://s0.wp.com/latex.php?latex=X+%3D+%5Bx_1%2Cx_2%2C%5Cdots%2Cx_p%5D%5Cin%5Cmathbb%7BC%7D%5E%7Bn+%5Ctimes+p%7D&bg=ffffff&fg=222222&s=0&c=20201002) , this condition can be expressed as
, this condition can be expressed as 
 .
.  in (1) then
in (1) then  with
with  square and nonsingular, so
square and nonsingular, so  , that is,
, that is,  the spectrum (set of eigenvalues) of
the spectrum (set of eigenvalues) of  the pseudoinverse of
the pseudoinverse of  and
and  . Then
. Then  . Furthermore, if
. Furthermore, if  is an eigenpair of
is an eigenpair of  then
then  is an eigenpair of
is an eigenpair of  is an eigenpair of
is an eigenpair of  , and
, and  since the columns of
since the columns of  is an eigenpair of
is an eigenpair of  for some
for some  , and
, and  , since
, since  . Hence
. Hence 
 gives
gives  , so
, so  so that
so that ![W = [X,\,Y]](https://s0.wp.com/latex.php?latex=W+%3D+%5BX%2C%5C%2CY%5D&bg=ffffff&fg=222222&s=0&c=20201002) is nonsingular. Let
is nonsingular. Let ![W^{-1} = \left[\begin{smallmatrix} G \\ H \end{smallmatrix}\right]](https://s0.wp.com/latex.php?latex=W%5E%7B-1%7D+%3D+%5Cleft%5B%5Cbegin%7Bsmallmatrix%7D+G+%5C%5C+H++++++++++++++++%5Cend%7Bsmallmatrix%7D%5Cright%5D&bg=ffffff&fg=222222&s=0&c=20201002) and note that
and note that  implies
implies  and
and  . We have
. We have ![\notag W^{-1}AW = \begin{bmatrix} G \\H \end{bmatrix} [AX,\, AY] = \begin{bmatrix} G \\H \end{bmatrix} [XB,\, AY] = \begin{bmatrix} B & GAY\\ 0 & HAY \end{bmatrix}, \qquad (2)](https://s0.wp.com/latex.php?latex=%5Cnotag++W%5E%7B-1%7DAW+%3D++%5Cbegin%7Bbmatrix%7D++++G+%5C%5CH++%5Cend%7Bbmatrix%7D+%5BAX%2C%5C%2C+AY%5D++%3D+%5Cbegin%7Bbmatrix%7D++++G+%5C%5CH++%5Cend%7Bbmatrix%7D+++%5BXB%2C%5C%2C+AY%5D++++%3D++%5Cbegin%7Bbmatrix%7D++++B+%26+GAY%5C%5C++++0+%26+HAY++%5Cend%7Bbmatrix%7D%2C+%5Cqquad+%282%29+&bg=ffffff&fg=222222&s=0&c=20201002)
 ,
,  chosen to be unitary.
chosen to be unitary.  , where
, where  is unitary and
is unitary and  and writing
and writing ![Q = [Q_1,\,Q_2]](https://s0.wp.com/latex.php?latex=Q+%3D+%5BQ_1%2C%5C%2CQ_2%5D&bg=ffffff&fg=222222&s=0&c=20201002) , where
, where  is
is  , and
, and 
 is
is  , we have
, we have  . Hence
. Hence  , the Schur decomposition provides a nested sequence of invariant subspaces of
, the Schur decomposition provides a nested sequence of invariant subspaces of  matrix and let
matrix and let  and
and  . Then the
. Then the  matrix
matrix  is the submatrix of
is the submatrix of  and the columns indexed by
and the columns indexed by  . For example, for the matrix
. For example, for the matrix ![\notag \begin{bmatrix} ~\fbox{1} & \fbox{2} & 3\mskip2mu \\ ~~4 & 5 & 6\mskip2mu~ \\ ~\fbox{7} & \fbox{8} & 9~\mskip2mu \end{bmatrix} = \begin{bmatrix} ~\fbox{1} & \fbox{2} & 3\mskip2mu~ \\[1pt] ~\fbox{4} & 5 & 6\mskip2mu~ \\ 7 & \fbox{8} & 9\mskip2mu \end{bmatrix},](https://s0.wp.com/latex.php?latex=%5Cnotag+++++%5Cbegin%7Bbmatrix%7D+%7E%5Cfbox%7B1%7D+%26+%5Cfbox%7B2%7D+%26+3%5Cmskip2mu+%5C%5C++++++++++++++++++++++++%7E%7E4+%26+5+%26+6%5Cmskip2mu%7E+%5C%5C++++++++++++++++++++++++%7E%5Cfbox%7B7%7D+%26+%5Cfbox%7B8%7D+%26+9%7E%5Cmskip2mu++++++++%5Cend%7Bbmatrix%7D+%3D+++++%5Cbegin%7Bbmatrix%7D+%7E%5Cfbox%7B1%7D+%26+%5Cfbox%7B2%7D+%26+3%5Cmskip2mu%7E+%5C%5C%5B1pt%5D++++++++++++++++++++++++%7E%5Cfbox%7B4%7D+%26+5+%26+6%5Cmskip2mu%7E+%5C%5C++++++++++++++++++++++++7+%26+%5Cfbox%7B8%7D+%26+9%5Cmskip2mu++++++++%5Cend%7Bbmatrix%7D%2C+&bg=ffffff&fg=222222&s=0&c=20201002)

 and columns
and columns 
 matrix elements and the matrix itself, but there are many of intermediate size: an
matrix elements and the matrix itself, but there are many of intermediate size: an  submatrices in total (counting both square and nonsquare submatrices).
submatrices in total (counting both square and nonsquare submatrices).  and
and  ,
,  , then
, then  ,
,  , then
, then  we denote by
we denote by  the sequence
the sequence  . Thus
. Thus  is another way of writing
is another way of writing  .
.  for the submatrix of
for the submatrix of  to
to  , that is,
, that is, 

 denotes the
denotes the  the
the  matrix
matrix  matrix, where each element is a
matrix, where each element is a ![\notag A = \left[\begin{array}{cc|cc} a_{11} & a_{12} & a_{13} & a_{14}\\ a_{21} & a_{22} & a_{23} & a_{24}\\\hline a_{31} & a_{32} & a_{33} & a_{34}\\ a_{41} & a_{42} & a_{43} & a_{44}\\ \end{array}\right] = \begin{bmatrix} A_{11} & A_{12} \\ A_{21} & A_{22} \end{bmatrix},](https://s0.wp.com/latex.php?latex=%5Cnotag+++A+%3D+%5Cleft%5B%5Cbegin%7Barray%7D%7Bcc%7Ccc%7D+++++++++a_%7B11%7D+%26+a_%7B12%7D+%26+a_%7B13%7D+%26+a_%7B14%7D%5C%5C+++++++++a_%7B21%7D+%26+a_%7B22%7D+%26+a_%7B23%7D+%26+a_%7B24%7D%5C%5C%5Chline+++++++++a_%7B31%7D+%26+a_%7B32%7D+%26+a_%7B33%7D+%26+a_%7B34%7D%5C%5C+++++++++a_%7B41%7D+%26+a_%7B42%7D+%26+a_%7B43%7D+%26+a_%7B44%7D%5C%5C+++++++++%5Cend%7Barray%7D%5Cright%5D++++%3D++%5Cbegin%7Bbmatrix%7D+++++++++A_%7B11%7D+%26+A_%7B12%7D+%5C%5C+++++++++A_%7B21%7D+%26+A_%7B22%7D++++++++%5Cend%7Bbmatrix%7D%2C+&bg=ffffff&fg=222222&s=0&c=20201002)

 ,
,  ,
,  ,
,  carried out on floating-point numbers. For example, evaluating the expression
carried out on floating-point numbers. For example, evaluating the expression  takes three flops. A square root, which occurs infrequently in numerical computation, is also counted as one flop.
takes three flops. A square root, which occurs infrequently in numerical computation, is also counted as one flop.  of two
of two  can be written
can be written  additions, or
additions, or  of two
of two  inner products, costing
inner products, costing  flops. As we are usually interested in flop counts for large dimensions we retain only the highest order terms, so we regard
flops. As we are usually interested in flop counts for large dimensions we retain only the highest order terms, so we regard  flops.
flops.  is a scalar,
is a scalar,  are
are  are
are 
 flops
flops
 flops
flops flops or less, so the interest is in the exponent (
flops or less, so the interest is in the exponent ( and comparing competing algorithms is more complicated.
and comparing competing algorithms is more complicated.  floating-point operations per second) for
floating-point operations per second) for  is an
is an  matrix
matrix 
 .
. (overdetermined or underdetermined)
(overdetermined or underdetermined)  minimizes
minimizes  and has the minimum
and has the minimum  is an SVD, where the
is an SVD, where the  matrix
matrix  and
and  are unitary and
are unitary and  with
with  (so that
(so that  ) with
) with  , then
, then
 . This formula gives an easy way to prove many identities satisfied by the pseudoinverse. In MATLAB, the function
. This formula gives an easy way to prove many identities satisfied by the pseudoinverse. In MATLAB, the function  and
and  .
.

 is
is  .
. ,
,  and if
and if  .
. is the transpose:
is the transpose:
 for
for  . A sufficient condition for this equality to hold is that
. A sufficient condition for this equality to hold is that  .
.
 as
as  . The convergence is at an asymptotically quadratic rate. However, about
. The convergence is at an asymptotically quadratic rate. However, about  iterations are required to reach the asymptotic phase, where
iterations are required to reach the asymptotic phase, where  , so the iteration is slow to converge when
, so the iteration is slow to converge when 
 is compact and convex (a nontrivial property proved by Toeplitz and Hausdorff), and it contains all the eigenvalues of
is compact and convex (a nontrivial property proved by Toeplitz and Hausdorff), and it contains all the eigenvalues of  matrices, with the eigenvalues shown as black dots. They were plotted using the function
matrices, with the eigenvalues shown as black dots. They were plotted using the function 
 ,
,
 lies between the largest and smallest eigenvalues of the Hermitian matrix
lies between the largest and smallest eigenvalues of the Hermitian matrix  , which define a vertical strip in which the numerical range lies. Since
, which define a vertical strip in which the numerical range lies. Since  , we can apply the same reasoning to the rotated matrix
, we can apply the same reasoning to the rotated matrix  , and taking a range of
, and taking a range of ![\theta\in[0,\pi]](https://s0.wp.com/latex.php?latex=%5Ctheta%5Cin%5B0%2C%5Cpi%5D&bg=ffffff&fg=222222&s=0&c=20201002) we obtain an approximation the boundary of the numerical range.
we obtain an approximation the boundary of the numerical range.
 is the largest eigenvalue of the Hermitian matrix
is the largest eigenvalue of the Hermitian matrix  for small positive
for small positive  .
.
 . Also,
. Also,  , where
, where  is the spectral radius (the largest absolute value of any eigenvalue), since
is the spectral radius (the largest absolute value of any eigenvalue), since 
 .
. does not hold in general). However, it is it true that
does not hold in general). However, it is it true that

 then we can bound
then we can bound  for all
for all 

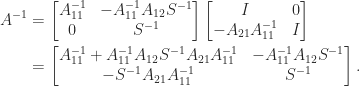
 block
block  the Schur complement is
the Schur complement is  . It is denoted by
. It is denoted by  . The block with respect to which the Schur complement is taken need not be the
. The block with respect to which the Schur complement is taken need not be the  is nonsingular, the Schur complement of
is nonsingular, the Schur complement of  .
.![\alpha = [i_1,i_2,\dots,i_k]](https://s0.wp.com/latex.php?latex=%5Calpha+%3D+%5Bi_1%2Ci_2%2C%5Cdots%2Ci_k%5D&bg=ffffff&fg=222222&s=0&c=20201002) , where
, where  , the Schur complement of
, the Schur complement of  in
in  , where
, where  is the complement of
is the complement of 
 :
:
 and
and  blocks in this equation gives
blocks in this equation gives  and
and  . Hence
. Hence  , which is the Schur complement of
, which is the Schur complement of  ) element of
) element of  -matrices,
-matrices,
 is the
is the  .
.

 , and since congruences preserve inertia (the number of positive, zero, and negative eigenvalues),
, and since congruences preserve inertia (the number of positive, zero, and negative eigenvalues),  , where “+” denotes the Moore-Penrose pseudo-inverse. The generalized Schur complement is useful in the context of Hermitian positive semidefinite matrices, as the following result shows.
, where “+” denotes the Moore-Penrose pseudo-inverse. The generalized Schur complement is useful in the context of Hermitian positive semidefinite matrices, as the following result shows.
 and
and  are both positive semidefinite.
are both positive semidefinite.

 for all
for all  at
at 
 ). The polynomial
). The polynomial  .
. , a degree
, a degree  , but
, but  of lowest degree such that
of lowest degree such that  is the minimal polynomial of
is the minimal polynomial of  , and in particular it divides the characteristic polynomial. Indeed by polynomial long division we can write
, and in particular it divides the characteristic polynomial. Indeed by polynomial long division we can write  , where the degree of
, where the degree of 
 then we have a contradiction to the minimality of the degree of
then we have a contradiction to the minimality of the degree of  and so
and so  and
and  are two different monic polynomials of minimum degree
are two different monic polynomials of minimum degree  such that
such that  ,
,  , then
, then  is a polynomial of degree less than
is a polynomial of degree less than  , and we can scale
, and we can scale  to be monic, so by the minimality of
to be monic, so by the minimality of  , or
, or  .
. , since
, since  . On the other hand, for the Jordan block
. On the other hand, for the Jordan block
 .
.
 are the distinct eigenvalues of
are the distinct eigenvalues of  is the dimension of the largest Jordan block in which
is the dimension of the largest Jordan block in which  appears. This expression is composed of linear factors (that is,
appears. This expression is composed of linear factors (that is,  for all
for all ![\notag A = \left[\begin{array}{cc|c|c|c} \lambda & 1 & & & \\ & \lambda & & & \\\hline & & \lambda & & \\\hline & & & \mu & \\\hline & & & & \mu \end{array}\right]](https://s0.wp.com/latex.php?latex=%5Cnotag++A+%3D+%5Cleft%5B%5Cbegin%7Barray%7D%7Bcc%7Cc%7Cc%7Cc%7D++++++%5Clambda+%26++1++++++%26+++++++++%26+++++%26+++%5C%5C++++++++++++++%26+%5Clambda+%26+++++++++%26+++++%26+++%5C%5C%5Chline++++++++++++++%26+++++++++%26+%5Clambda+%26+++++%26+++%5C%5C%5Chline++++++++++++++%26+++++++++%26+++++++++%26+%5Cmu+%26++++%5C%5C%5Chline++++++++++++++%26+++++++++%26+++++++++%26+++++%26+%5Cmu+++%5Cend%7Barray%7D%5Cright%5D+&bg=ffffff&fg=222222&s=0&c=20201002)
 , while the characteristic polynomial is
, while the characteristic polynomial is  .
. ? Since
? Since  , we have
, we have  for
for  . For any linear polynomial
. For any linear polynomial  ,
,  , which is nonzero since
, which is nonzero since  has rank
has rank  has rank
has rank  to a linear system of equations
to a linear system of equations  .
. .
. .
. (where we include the permutations in
(where we include the permutations in  ). Most of the work is in the LU factorization, which costs
). Most of the work is in the LU factorization, which costs  , which total only
, which total only  satisfies (omitting constants)
satisfies (omitting constants)
 is the matrix condition number in the
is the matrix condition number in the  -norm. We would like refinement to produce a solution accurate to precision
-norm. We would like refinement to produce a solution accurate to precision 
 .
. to the level of
to the level of  , the unit roundoff for IEEE single precision arithmetic.
, the unit roundoff for IEEE single precision arithmetic.


 is no larger than
is no larger than  and can be much smaller, especially if
and can be much smaller, especially if  by substitution in single precision, obtaining
by substitution in single precision, obtaining  in single precision.
in single precision. entirely in double precision arithmetic. The algorithm achieves the same limiting accuracy (4) and limiting residual (3) provided that
entirely in double precision arithmetic. The algorithm achieves the same limiting accuracy (4) and limiting residual (3) provided that  .
.
 is not formed but is applied to a vector as a multiplication with
is not formed but is applied to a vector as a multiplication with 