An eigenvalue of a square matrix 



An 






is a scalar polynomial of degree 

A real matrix may have complex eigenvalues, but they appear in complex conjugate pairs. Indeed 


Here are some 

Note that 



A symmetric matrix (









A skew-symmetric matrix (







In general, the eigenvalues of a matrix 


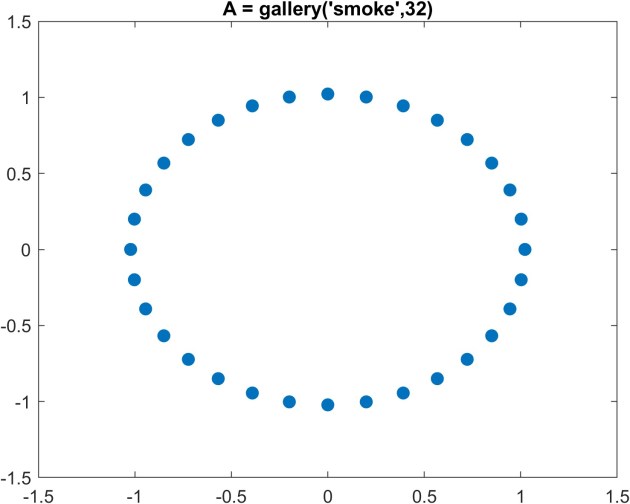
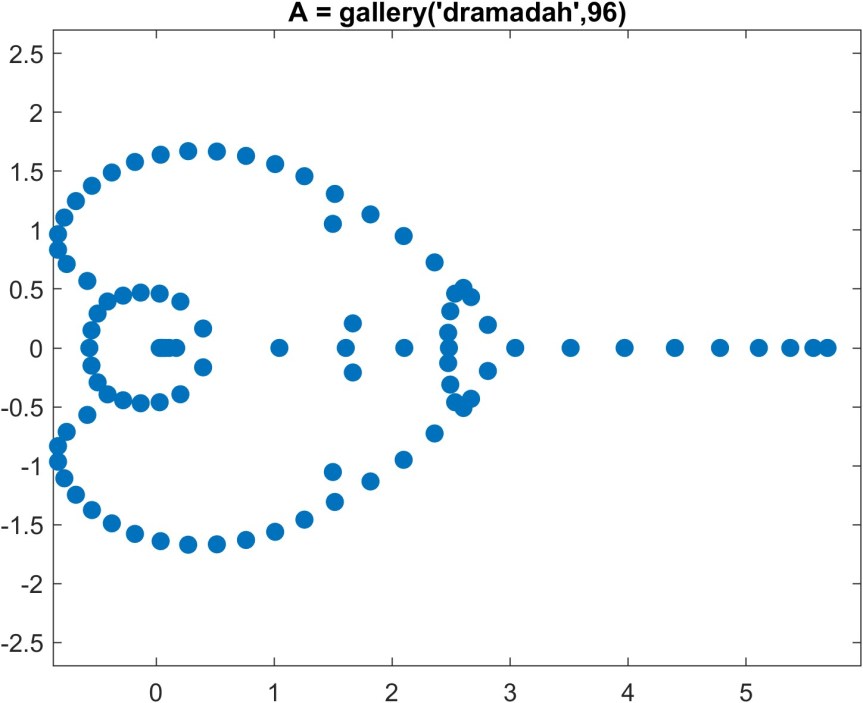
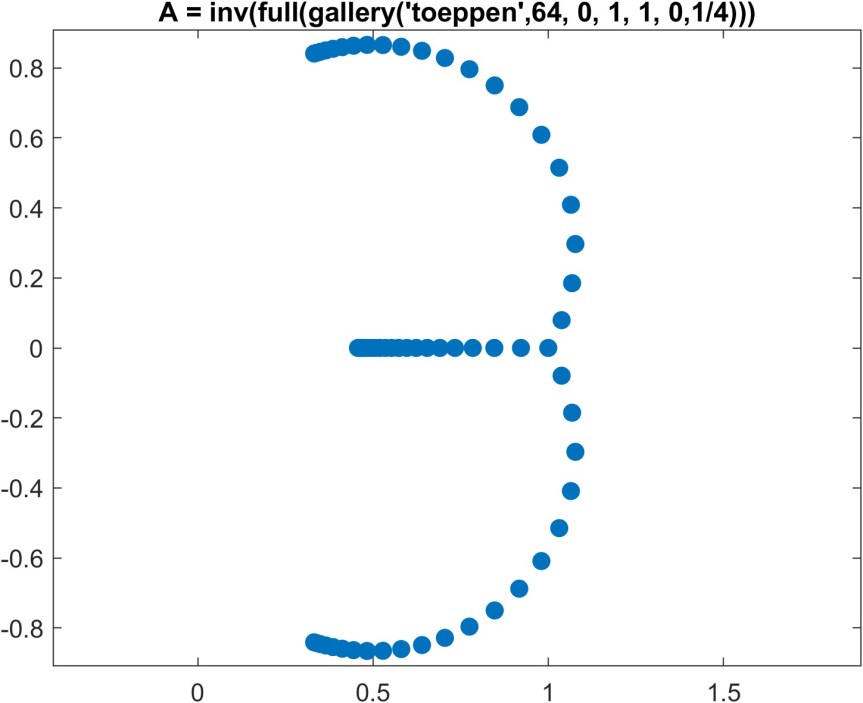
Here are some example eigenvalue distributions, computed in MATLAB. (The eigenvalues are computed at high precision using the Advanpix Multiprecision Computing Toolbox in order to ensure that rounding errors do not affect the plots.) The second and third matrices are real, so the eigenvalues are symmetrically distributed about the real axis. (The first matrix is complex.)
Although this article is about eigenvalues we need to say a little more about eigenvectors. An 


![X = [x_1,x_2,\dots,x_n]](https://s0.wp.com/latex.php?latex=X+%3D+%5Bx_1%2Cx_2%2C%5Cdots%2Cx_n%5D&bg=ffffff&fg=222222&s=0&c=20201002)




If there are repeated eigenvalues there can be less than ![\left[\begin{smallmatrix}1 \\ 0 \end{smallmatrix}\right]](https://s0.wp.com/latex.php?latex=%5Cleft%5B%5Cbegin%7Bsmallmatrix%7D1+%5C%5C+0+%5Cend%7Bsmallmatrix%7D%5Cright%5D&bg=ffffff&fg=222222&s=0&c=20201002)
Here are some questions about eigenvalues.
- What matrix decompositions reveal eigenvalues? The answer is the Jordan canonical form and the Schur decomposition. The Jordan canonical form shows how many linearly independent eigenvectors are associated with each eigenvalue.
- Can we obtain better bounds on where eigenvalues lie in the complex plane? Many results are available, of which the most well-known is Gershgorin’s theorem.
- How can we compute eigenvalues? Various methods are available. The QR algorithm is widely used and is applicable to all types of eigenvalue problems.
Finally, we note that the concept of eigenvalue is more general than just for matrices: it extends to nonlinear operators on finite or infinite dimensional spaces.
References
Many books include treatments of eigenvalues of matrices. We give just three examples.
- Gene Golub and Charles F. Van Loan, Matrix Computations, fourth edition, Johns Hopkins University Press, Baltimore, MD, USA, 2013.
- Roger A. Horn and Charles R. Johnson, Matrix Analysis, second edition, Cambridge University Press, 2013. My review of the second edition.
- Carl D. Meyer, Matrix Analysis and Applied Linear Algebra, Society for Industrial and Applied Mathematics, Philadelphia, PA, USA, 2000.
Related Blog Posts
This article is part of the “What Is” series, available from https://nhigham.com/category/what-is and in PDF form from the GitHub repository https://github.com/higham/what-is.
