A symmetric indefinite matrix  is a symmetric matrix for which the quadratic form
is a symmetric matrix for which the quadratic form  takes both positive and negative values. By contrast, for a positive definite matrix
takes both positive and negative values. By contrast, for a positive definite matrix  for all nonzero
for all nonzero  and for a negative definite matrix
and for a negative definite matrix  for all nonzero .
for all nonzero .
A neat way to express the indefinitess is that there exist vectors and  for which
for which  .
.
A symmetric indefinite matrix has both positive and negative eigenvalues and in some sense is a typical symmetric matrix. For example, a random symmetric matrix is usually indefinite:
>> rng(3); B = rand(4); A = B + B'; eig(A)'
ans =
-8.9486e-01 -6.8664e-02 1.1795e+00 3.9197e+00
In general it is difficult to tell if a symmetric matrix is indefinite or definite, but there is one easy-to-spot sufficient condition for indefinitess: if the matrix has a zero diagonal element that has a nonzero element in its row then it is indefinite. Indeed if  then
then  , where
, where  is the
is the  th unit vector, so cannot be positive definite or negative definite. The existence of a nonzero element in the row of the zero rules out the matrix being positive semidefinite (
th unit vector, so cannot be positive definite or negative definite. The existence of a nonzero element in the row of the zero rules out the matrix being positive semidefinite ( for all ) or negative semidefinite (
for all ) or negative semidefinite ( for all ).
for all ).
An example of a symmetric indefinite matrix is a saddle point matrix, which has the block  form
form

where is symmetric positive definite and  . When is the identity matrix,
. When is the identity matrix,  is the augmented system matrix associated with a least squares problem
is the augmented system matrix associated with a least squares problem  . Another example is the
. Another example is the  reverse identity matrix
reverse identity matrix  , illustrated by
, illustrated by
which has eigenvalues  (exercise: how many
(exercise: how many  s and how many
s and how many  s?). A third example is a Toeplitz tridiagonal matrix with zero diagonal:
s?). A third example is a Toeplitz tridiagonal matrix with zero diagonal:
>> A = full(gallery('tridiag',5,1,0,1)), eig(sym(A))'
A =
0 1 0 0 0
1 0 1 0 0
0 1 0 1 0
0 0 1 0 1
0 0 0 1 0
ans =
[-1, 0, 1, 3^(1/2), -3^(1/2)]
How can we exploit symmetry in solving a linear system  with a symmetric indefinite matrix ? A Cholesky factorization does not exist, but we could try to compute a factorization
with a symmetric indefinite matrix ? A Cholesky factorization does not exist, but we could try to compute a factorization  , where
, where  is unit lower triangular and
is unit lower triangular and  is diagonal with both positive and negative diagonal entries. However, this factorization does not always exist and if it does, its computation in floating-point arithmetic can be numerically unstable. The simplest example of nonexistence is the matrix
is diagonal with both positive and negative diagonal entries. However, this factorization does not always exist and if it does, its computation in floating-point arithmetic can be numerically unstable. The simplest example of nonexistence is the matrix

The way round this is to allow to have  blocks. We can compute a block
blocks. We can compute a block  factorization
factorization  , were
, were  is a permutation matrix, is unit lower triangular, and is block diagonal with diagonal blocks of size or
is a permutation matrix, is unit lower triangular, and is block diagonal with diagonal blocks of size or  . Various pivoting strategies, which determine , are possible, but the recommend one is the symmetric rook pivoting strategy of Ashcraft, Grimes, and Lewis (1998), which has the key property of producing a bounded factor. Solving now reduces to substitutions with and a solve with , which involves solving linear systems for the blocks and doing divisions for the
. Various pivoting strategies, which determine , are possible, but the recommend one is the symmetric rook pivoting strategy of Ashcraft, Grimes, and Lewis (1998), which has the key property of producing a bounded factor. Solving now reduces to substitutions with and a solve with , which involves solving linear systems for the blocks and doing divisions for the  blocks (scalars).
blocks (scalars).
MATLAB implements factorization in its ldl function. Here is an example using Anymatrix:
>> A = anymatrix('core/blockhouse',4), [L,D,P] = ldl(A), eigA = eig(A)'
A =
-4.0000e-01 -8.0000e-01 -2.0000e-01 4.0000e-01
-8.0000e-01 4.0000e-01 -4.0000e-01 -2.0000e-01
-2.0000e-01 -4.0000e-01 4.0000e-01 -8.0000e-01
4.0000e-01 -2.0000e-01 -8.0000e-01 -4.0000e-01
L =
1.0000e+00 0 0 0
0 1.0000e+00 0 0
5.0000e-01 -8.3267e-17 1.0000e+00 0
-2.2204e-16 -5.0000e-01 0 1.0000e+00
D =
-4.0000e-01 -8.0000e-01 0 0
-8.0000e-01 4.0000e-01 0 0
0 0 5.0000e-01 -1.0000e+00
0 0 -1.0000e+00 -5.0000e-01
P =
1 0 0 0
0 1 0 0
0 0 1 0
0 0 0 1
eigA =
-1.0000e+00 -1.0000e+00 1.0000e+00 1.0000e+00
Notice the blocks on the diagonal of , each of which contains one negative eigenvalue and one positive eigenvalue. The eigenvalues of are not the same as those of , but since and are congruent they have the same number of positive, zero, and negative eigenvalues.
References
- Cleve Ashcraft, Roger Grimes, and John Lewis, Accurate Symmetric Indefinite Linear Equation Solvers, SIAM J. Matrix Anal. Appl. 20, 513–561, 1998.
- Nicholas J. Higham and Mantas Mikaitis, Anymatrix: An Extendable MATLAB Matrix Collection, Numer. Algorithms, 90:3, 1175–1196, 2021.
















































 is diagonalizable if there exists a nonsingular matrix
is diagonalizable if there exists a nonsingular matrix  such that
such that  is diagonal. In other words, a diagonalizable matrix is one that is similar to a diagonal matrix.
is diagonal. In other words, a diagonalizable matrix is one that is similar to a diagonal matrix. is equivalent to
is equivalent to  with
with  ,
,  , where
, where ![X = [x_1,x_2,\dots, x_n]](https://s0.wp.com/latex.php?latex=X+%3D+%5Bx_1%2Cx_2%2C%5Cdots%2C+x_n%5D&bg=ffffff&fg=222222&s=0&c=20201002) . Hence
. Hence  ). A matrix with distinct eigenvalues is also diagonalizable.
). A matrix with distinct eigenvalues is also diagonalizable. has distinct eigenvalues then it is diagonalizable.
has distinct eigenvalues then it is diagonalizable. with corresponding eigenvectors
with corresponding eigenvectors  . Suppose that
. Suppose that  for some
for some  . Then
. Then
 since
since  for
for  and
and  . Premultiplying
. Premultiplying  by
by  shows, in the same way, that
shows, in the same way, that  . Continuing in this way we find that
. Continuing in this way we find that  . Therefore the
. Therefore the  are linearly independent and hence
are linearly independent and hence ![\bigl[\begin{smallmatrix} 0 & 1 \\ 0 & 0 \end{smallmatrix}\bigr]](https://s0.wp.com/latex.php?latex=%5Cbigl%5B%5Cbegin%7Bsmallmatrix%7D+0+%26+1+%5C%5C+0+%26+0+%5Cend%7Bsmallmatrix%7D%5Cbigr%5D&bg=ffffff&fg=222222&s=0&c=20201002) . This matrix is a
. This matrix is a  , that is, any matrix in
, that is, any matrix in  diagonalizable, where
diagonalizable, where  are nonzero? There are
are nonzero? There are  zero eigenvalues with eigenvectors any set of linearly independent vectors orthogonal to
zero eigenvalues with eigenvectors any set of linearly independent vectors orthogonal to  then
then  is the remaining eigenvalue, with eigenvector
is the remaining eigenvalue, with eigenvector  then all the eigenvalues of
then all the eigenvalues of ![x = \bigl[{1 \atop 0} \bigr]](https://s0.wp.com/latex.php?latex=x+%3D+%5Cbigl%5B%7B1+%5Catop+0%7D+%5Cbigr%5D&bg=ffffff&fg=222222&s=0&c=20201002) and
and ![y = \bigl[{0 \atop 1} \bigr]](https://s0.wp.com/latex.php?latex=y+%3D+%5Cbigl%5B%7B0+%5Catop+1%7D+%5Cbigr%5D&bg=ffffff&fg=222222&s=0&c=20201002) , so
, so  is stochastic then
is stochastic then  , where
, where ![e = [1,1,\dots,1]^T](https://s0.wp.com/latex.php?latex=e+%3D+%5B1%2C1%2C%5Cdots%2C1%5D%5ET&bg=ffffff&fg=222222&s=0&c=20201002) is the vector of ones. This means that
is the vector of ones. This means that  is an eigenvector of
is an eigenvector of ![\notag \begin{aligned} A_n &= n^{-1}ee^T, \quad \textrm{in particular}~~ A_3 = \begin{bmatrix} \frac{1}{3} & \frac{1}{3} & \frac{1}{3}\\[3pt] \frac{1}{3} & \frac{1}{3} & \frac{1}{3}\\[3pt] \frac{1}{3} & \frac{1}{3} & \frac{1}{3} \end{bmatrix}, \qquad (1)\\ B_n &= \frac{1}{n-1}(ee^T -I), \quad \textrm{in particular}~~ B_3 = \begin{bmatrix} 0 & \frac{1}{2} & \frac{1}{2}\\[2pt] \frac{1}{2} & 0 & \frac{1}{2}\\[2pt] \frac{1}{2} & \frac{1}{2} & 0 \end{bmatrix}, \qquad (2)\\ C_n &= \begin{bmatrix} 1 & & & \\ \frac{1}{2} & \frac{1}{2} & & \\ \vdots & \vdots &\ddots & \\ \frac{1}{n} & \frac{1}{n} &\cdots & \frac{1}{n} \end{bmatrix}. \qquad (3)\\ \end{aligned}](https://s0.wp.com/latex.php?latex=%5Cnotag+%5Cbegin%7Baligned%7D+++A_n+%26%3D+n%5E%7B-1%7Dee%5ET%2C+%5Cquad+%5Ctextrm%7Bin+particular%7D%7E%7E+++++A_3+%3D+%5Cbegin%7Bbmatrix%7D++++%5Cfrac%7B1%7D%7B3%7D+%26+%5Cfrac%7B1%7D%7B3%7D+%26+%5Cfrac%7B1%7D%7B3%7D%5C%5C%5B3pt%5D++++%5Cfrac%7B1%7D%7B3%7D+%26+%5Cfrac%7B1%7D%7B3%7D+%26+%5Cfrac%7B1%7D%7B3%7D%5C%5C%5B3pt%5D++++%5Cfrac%7B1%7D%7B3%7D+%26+%5Cfrac%7B1%7D%7B3%7D+%26+%5Cfrac%7B1%7D%7B3%7D++++%5Cend%7Bbmatrix%7D%2C+%5Cqquad+%281%29%5C%5C+++B_n+%26%3D+%5Cfrac%7B1%7D%7Bn-1%7D%28ee%5ET+-I%29%2C+%5Cquad+%5Ctextrm%7Bin+particular%7D%7E%7E+++++B_3+%3D+%5Cbegin%7Bbmatrix%7D++++++++++++++0+%26+%5Cfrac%7B1%7D%7B2%7D+%26+%5Cfrac%7B1%7D%7B2%7D%5C%5C%5B2pt%5D++++%5Cfrac%7B1%7D%7B2%7D+%26+0+++++++++++%26+%5Cfrac%7B1%7D%7B2%7D%5C%5C%5B2pt%5D++++%5Cfrac%7B1%7D%7B2%7D+%26+%5Cfrac%7B1%7D%7B2%7D+%26+0++++%5Cend%7Bbmatrix%7D%2C++++%5Cqquad+%282%29%5C%5C+++C_n+%26%3D+%5Cbegin%7Bbmatrix%7D+++++++++++++1+++++++++%26+++++++++++++++++++%26+++++++++++%26++++%5C%5C++++++%5Cfrac%7B1%7D%7B2%7D++++++%26++%5Cfrac%7B1%7D%7B2%7D++++++%26+++++++++++%26++++%5C%5C++++++%5Cvdots+++++++++++%26++%5Cvdots+++++++++++%26%5Cddots+++++%26++++%5C%5C++++++%5Cfrac%7B1%7D%7Bn%7D++++++%26++%5Cfrac%7B1%7D%7Bn%7D++++++%26%5Ccdots+++++%26++%5Cfrac%7B1%7D%7Bn%7D++++++%5Cend%7Bbmatrix%7D.+++%5Cqquad+%283%29%5C%5C+%5Cend%7Baligned%7D+&bg=ffffff&fg=222222&s=0&c=20201002)
 is bounded by
is bounded by  for any norm. For a stochastic matrix, taking the
for any norm. For a stochastic matrix, taking the  -norm (the maximum row sum of absolute values) gives
-norm (the maximum row sum of absolute values) gives  , so since we know that
, so since we know that  . It can be shown that
. It can be shown that  , which implies
, which implies  . Every eigenvalue
. Every eigenvalue  lies in the union of the
lies in the union of the 
 is nonnegative and
is nonnegative and  , so
, so  converge as
converge as  ? The answer is that it does, and the limit is stochastic, as long as
? The answer is that it does, and the limit is stochastic, as long as 
 , all even powers are equal to
, all even powers are equal to  and all odd powers are equal to
and all odd powers are equal to  for all
for all  as
as  converges to the matrix with
converges to the matrix with  element is the probability of moving from state
element is the probability of moving from state  over a time step. It has nonnegative entries and the rows sum to
over a time step. It has nonnegative entries and the rows sum to  , is a transition matrix for a time period a factor
, is a transition matrix for a time period a factor  (years to months) and
(years to months) and  (weeks to days) are among the values of interest. Unfortunately, a stochastic
(weeks to days) are among the values of interest. Unfortunately, a stochastic 

 (so that
(so that  is row-stochastic). A matrix that is both row-stochastic and column-stochastic is called doubly stochastic. A permutation matrix is an example of a doubly stochastic matrix. If
is row-stochastic). A matrix that is both row-stochastic and column-stochastic is called doubly stochastic. A permutation matrix is an example of a doubly stochastic matrix. If  is a unitary matrix then the matrix with
is a unitary matrix then the matrix with  is doubly stochastic. A magic square scaled by the magic sum is also doubly stochastic. For example,
is doubly stochastic. A magic square scaled by the magic sum is also doubly stochastic. For example, , where
, where  is the number of positive eigenvalues of
is the number of positive eigenvalues of  is the number of negative eigenvalues of
is the number of negative eigenvalues of  is the number of zero eigenvalues of
is the number of zero eigenvalues of  . The difference
. The difference  is called the signature.
is called the signature. and
and  . But in general the diagonal elements do not tell us much about the inertia. For example, here is a matrix that has positive diagonal elements but only one positive eigenvalue (and this example works for any
. But in general the diagonal elements do not tell us much about the inertia. For example, here is a matrix that has positive diagonal elements but only one positive eigenvalue (and this example works for any  for a nonsingular matrix
for a nonsingular matrix  is nonsingular then
is nonsingular then  .
. , and
, and  can be read off the diagonal of
can be read off the diagonal of  factorization, in which
factorization, in which  .
. and
and 
 .
.
 . From the
. From the  we have
we have

 it follows that
it follows that  .
. are defined in terms of a summation over the rows of
are defined in terms of a summation over the rows of  matrix
matrix![\notag \left[\begin{array}{ccccc} 5/4 & 1 & 3/4 & 1/2 & 1/4 \\ 1 & 0 & 0 & 0 & 0\\ -1 & 1 & 0 & 0 & 0\\ 0 & 0 & 1 & 3 & 0\\ 0 & 0 & 0 & 1/2 & 5 \end{array}\right]](https://s0.wp.com/latex.php?latex=%5Cnotag+%5Cleft%5B%5Cbegin%7Barray%7D%7Bccccc%7D+5%2F4+++++++++%26+1+%26+3%2F4+++++++++%26+1%2F2+++++++++%26+1%2F4++++++++%5C%5C+1+%26+0+%26+0+%26+0+%26+0%5C%5C+-1+%26+1+%26+0+%26+0+%26+0%5C%5C+0+%26+0+%26+1+%26+3+%26+0%5C%5C+0+%26+0+%26+0+%26+1%2F2+++++++++%26+5+%5Cend%7Barray%7D%5Cright%5D+&bg=ffffff&fg=222222&s=0&c=20201002)
 The eigenvalues—three real and one complex conjugate pair—are the black dots. It happens that each disc contains an eigenvalue, but this is not always the case. For the matrix
The eigenvalues—three real and one complex conjugate pair—are the black dots. It happens that each disc contains an eigenvalue, but this is not always the case. For the matrix![\notag \left[\begin{array}{cc} 2 & -1\\ 2 & 0 \end{array}\right]](https://s0.wp.com/latex.php?latex=%5Cnotag+%5Cleft%5B%5Cbegin%7Barray%7D%7Bcc%7D+2+%26+-1%5C%5C+2+%26+0+%5Cend%7Barray%7D%5Cright%5D+&bg=ffffff&fg=222222&s=0&c=20201002)
 and the blue disc does not contain an eigenvalue. The next result, which is proved by a continuity argument, provides additional information that increases the utility of Gershgorin’s theorem. In particular it says that if a disc is disjoint from the other discs then it contains an eigenvalue.
and the blue disc does not contain an eigenvalue. The next result, which is proved by a continuity argument, provides additional information that increases the utility of Gershgorin’s theorem. In particular it says that if a disc is disjoint from the other discs then it contains an eigenvalue. would also lie in the disc, contradicting Theorem 2.
would also lie in the disc, contradicting Theorem 2. for some nonsingular diagonal matrix
for some nonsingular diagonal matrix  . For
. For  the rightmost disc shrinks and remains distinct from the others and we obtain the sharper bounds
the rightmost disc shrinks and remains distinct from the others and we obtain the sharper bounds  . The discs for
. The discs for 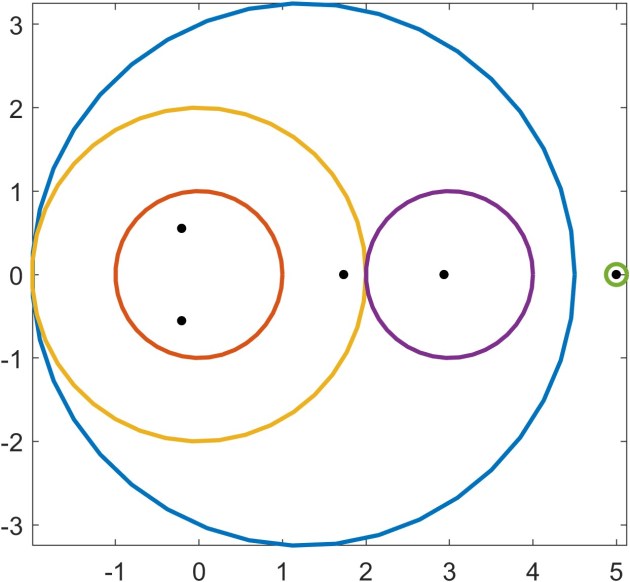
 for some positive integer
for some positive integer 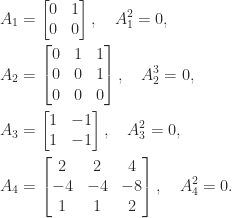
 is the
is the  matrix
matrix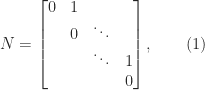

 . The superdiagonal of ones moves up to the right with each increase in the index of the power until it disappears off the top right corner of the matrix.
. The superdiagonal of ones moves up to the right with each increase in the index of the power until it disappears off the top right corner of the matrix. has rank
has rank  with
with  then
then  . We simply took orthogonal vectors
. We simply took orthogonal vectors ![x =[2, -4, 1]^T](https://s0.wp.com/latex.php?latex=x+%3D%5B2%2C+-4%2C+1%5D%5ET&bg=ffffff&fg=222222&s=0&c=20201002) and
and ![y = [1, 1, 2]^T](https://s0.wp.com/latex.php?latex=y+%3D+%5B1%2C+1%2C+2%5D%5ET&bg=ffffff&fg=222222&s=0&c=20201002) .
. with
with  implies
implies  or
or  . Consequently, the trace and determinant of a nilpotent matrix are both zero.
. Consequently, the trace and determinant of a nilpotent matrix are both zero. , since such a matrix has a spectral decomposition
, since such a matrix has a spectral decomposition  and the matrix
and the matrix  is zero. It is only for nonnormal matrices that nilpotency is a nontrivial property, and the best way to understand it is with the Jordan canonical form (JCF). The JCF of a matrix with only zero eigenvalues has the form
is zero. It is only for nonnormal matrices that nilpotency is a nontrivial property, and the best way to understand it is with the Jordan canonical form (JCF). The JCF of a matrix with only zero eigenvalues has the form  , where
, where  , where
, where  is of the form (1) and hence
is of the form (1) and hence  . It follows that the index of nilpotency is
. It follows that the index of nilpotency is  .
. and all other blocks are
and all other blocks are  for
for  in (1).
in (1). , which means that
, which means that  is singular, since
is singular, since  . But
. But
 , the eigenvalues of
, the eigenvalues of  , so if
, so if  .
.
 are upper triangular, that is,
are upper triangular, that is,  for
for  . For such a matrix the eigenvalues are the diagonal elements.
. For such a matrix the eigenvalues are the diagonal elements. ) or Hermitian matrix (
) or Hermitian matrix ( , where
, where  ) has real eigenvalues. A proof is
) has real eigenvalues. A proof is  so premultiplying the first equation by
so premultiplying the first equation by  and postmultiplying the second by
and postmultiplying the second by  and
and  , which means that
, which means that  , or
, or  since
since  . The matrix
. The matrix  ) or skew-Hermitian complex matrix (
) or skew-Hermitian complex matrix ( ) has pure imaginary eigenvalues. A proof is similar to the Hermitian case:
) has pure imaginary eigenvalues. A proof is similar to the Hermitian case:  and so
and so  is equal to both
is equal to both  and
and  , so
, so  . The matrix
. The matrix  above is skew-symmetric.
above is skew-symmetric. , because for any matrix norm
, because for any matrix norm  it can be shown that every eigenvalue satisfies
it can be shown that every eigenvalue satisfies  .
.
 for some nonsingular matrix
for some nonsingular matrix  the matrix of eigenvalues. If we write
the matrix of eigenvalues. If we write ![X = [x_1,x_2,\dots,x_n]](https://s0.wp.com/latex.php?latex=X+%3D+%5Bx_1%2Cx_2%2C%5Cdots%2Cx_n%5D&bg=ffffff&fg=222222&s=0&c=20201002) then
then  ,
, ![\left[\begin{smallmatrix}1 \\ 0 \end{smallmatrix}\right]](https://s0.wp.com/latex.php?latex=%5Cleft%5B%5Cbegin%7Bsmallmatrix%7D1+%5C%5C+0+%5Cend%7Bsmallmatrix%7D%5Cright%5D&bg=ffffff&fg=222222&s=0&c=20201002) (or any nonzero scalar multiple of it). This matrix is a Jordan block. The matrix
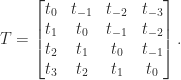
(or any nonzero scalar multiple of it). This matrix is a Jordan block. The matrix  is a Toeplitz matrix if
is a Toeplitz matrix if  for
for  parameters
parameters  . A Toeplitz matrix has constant diagonals. For
. A Toeplitz matrix has constant diagonals. For  :
:
 .
. can be solved in less than the
can be solved in less than the  flops that would be required by LU factorization. Indeed methods are available that require only
flops that would be required by LU factorization. Indeed methods are available that require only  flops; see Golub and Van Loan (2013) for details.
flops; see Golub and Van Loan (2013) for details.
 . It follows that the product of two upper triangular Toeplitz matrices is again upper triangular Toeplitz, upper triangular Toeplitz matrices commute, and
. It follows that the product of two upper triangular Toeplitz matrices is again upper triangular Toeplitz, upper triangular Toeplitz matrices commute, and  is also an upper triangular Toeplitz matrix (assuming
is also an upper triangular Toeplitz matrix (assuming  is nonzero, so that
is nonzero, so that  is nonsingular).
is nonsingular).
 are
are

 , so that
, so that  is a unitary matrix. (
is a unitary matrix. ( is a Vandermonde matrix with points the roots of unity.) Specifically,
is a Vandermonde matrix with points the roots of unity.) Specifically,
 ). Moreover, the eigenvalues are given by
). Moreover, the eigenvalues are given by  , where
, where  is the first unit vector.
is the first unit vector. , where
, where  flops, since multiplication by
flops, since multiplication by  , the
, the  version of which is
version of which is

 . The eigenvalues are
. The eigenvalues are  ,
,  , where
, where  . The matrix is singular when
. The matrix is singular when 