The definition of matrix multiplication says that for  matrices
matrices  and
and  , the product
, the product  is given by
is given by  . Each element of
. Each element of  is an inner product of a row of and a column of , so if this formula is used then the cost of forming is
is an inner product of a row of and a column of , so if this formula is used then the cost of forming is  additions and multiplications, that is,
additions and multiplications, that is,  operations. For over a century after the development of matrix algebra in the 1850s by Cayley, Sylvester and others, all methods for matrix multiplication were based on this formula and required operations.
operations. For over a century after the development of matrix algebra in the 1850s by Cayley, Sylvester and others, all methods for matrix multiplication were based on this formula and required operations.
In 1969 Volker Strassen showed that when  the product can be computed from the formulas
the product can be computed from the formulas

The evaluation requires  multiplications and
multiplications and  additions instead of
additions instead of  multiplications and
multiplications and  additions for the usual formulas.
additions for the usual formulas.
At first sight, Strassen’s formulas may appear simply to be a curiosity. However, the formulas do not rely on commutativity so are valid when the  and
and  are matrices, in which case for large dimensions the saving of one multiplication greatly outweighs the extra
are matrices, in which case for large dimensions the saving of one multiplication greatly outweighs the extra  additions. Assuming
additions. Assuming  is a power of
is a power of  , we can partition and into four blocks of size
, we can partition and into four blocks of size  , apply Strassen’s formulas for the multiplication, and then apply the same formulas recursively on the half-sized matrix products.
, apply Strassen’s formulas for the multiplication, and then apply the same formulas recursively on the half-sized matrix products.
Let us examine the number of multiplications for the recursive Strassen algorithm. Denote by  the number of scalar multiplications required to multiply two
the number of scalar multiplications required to multiply two  matrices. We have
matrices. We have  , so
, so

But  . The number of additions can be shown to be of the same order of magnitude, so the algorithm requires
. The number of additions can be shown to be of the same order of magnitude, so the algorithm requires  operations.
operations.
Strassen’s work sparked interest in finding matrix multiplication algorithms of even lower complexity. Since there are  elements of data, which must each participate in at least one operation, the exponent of in the operation count must be at least .
elements of data, which must each participate in at least one operation, the exponent of in the operation count must be at least .
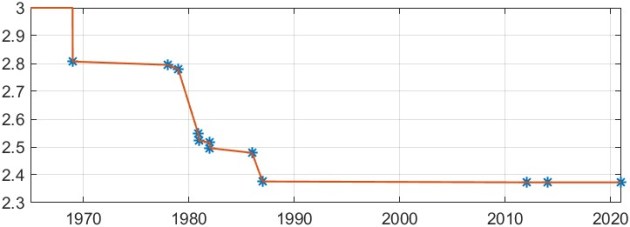
The current record upper bound on the exponent is  , proved by Alman and Vassilevska Williams (2021) which improved on the previous record of
, proved by Alman and Vassilevska Williams (2021) which improved on the previous record of  , proved by Le Gall (2014) The following figure plots the best upper bound for the exponent for matrix multiplication over time.
, proved by Le Gall (2014) The following figure plots the best upper bound for the exponent for matrix multiplication over time.
In the methods that achieve exponents lower than 2.775, various intricate techniques are used, based on representing matrix multiplication in terms of bilinear or trilinear forms and their representation as tensors having low rank. Laderman, Pan, and Sha (1993) explain that for these methods “very large overhead constants are hidden in the ` ‘ notation”, and that the methods “improve on Strassen’s (and even the classical) algorithm only for immense numbers
‘ notation”, and that the methods “improve on Strassen’s (and even the classical) algorithm only for immense numbers  .”
.”
Strassen’s method, when carefully implemented, can be faster than conventional matrix multiplication for reasonable dimensions. In practice, one does not recur down to  matrices, but rather uses conventional multiplication once
matrices, but rather uses conventional multiplication once  matrices are reached, where the parameter
matrices are reached, where the parameter  is tuned for the best performance.
is tuned for the best performance.
Strassen’s method has the drawback that it satisfies a weaker form of rounding error bound that conventional multiplication. For conventional multiplication of  and
and  we have the componentwise bound
we have the componentwise bound

where  and
and  is the unit roundoff. For Strassen’s method we have only a normwise error bound. The following result uses the norm
is the unit roundoff. For Strassen’s method we have only a normwise error bound. The following result uses the norm  , which is not a consistent norm.
, which is not a consistent norm.
Theorem 1 (Brent). Let  , where
, where  . Suppose that
. Suppose that  is computed by Strassen’s method and that
is computed by Strassen’s method and that  is the threshold at which conventional multiplication is used. The computed product
is the threshold at which conventional multiplication is used. The computed product  satisfies
satisfies
![\notag \|C - \widehat{C}\| \le \left[ \Bigl( \displaystyle\frac{n}{n_0} \Bigr)^{\log_2{12}} (n_0^2+5n_0) - 5n \right] u \|A\|\, \|B\| + O(u^2). \qquad(2)](https://s0.wp.com/latex.php?latex=%5Cnotag++++%5C%7CC+-+%5Cwidehat%7BC%7D%5C%7C+%5Cle+%5Cleft%5B+%5CBigl%28+%5Cdisplaystyle%5Cfrac%7Bn%7D%7Bn_0%7D+%5CBigr%29%5E%7B%5Clog_2%7B12%7D%7D+++++++++++++++++++++++%28n_0%5E2%2B5n_0%29+-+5n+%5Cright%5D+u+%5C%7CA%5C%7C%5C%2C+%5C%7CB%5C%7C+++++++++++++++++++++++%2B+O%28u%5E2%29.+%5Cqquad%282%29+&bg=ffffff&fg=222222&s=0&c=20201002)
With full recursion ( ) the constant in (2) is
) the constant in (2) is  , whereas with just one level of recursion (
, whereas with just one level of recursion ( ) it is
) it is  . These compare with
. These compare with  for conventional multiplication (obtained by taking norms in (1)). So the constant for Strassen’s method grows at a faster rate than that for conventional multiplication no matter what the choice of .
for conventional multiplication (obtained by taking norms in (1)). So the constant for Strassen’s method grows at a faster rate than that for conventional multiplication no matter what the choice of .
The fact that Strassen’s method does not satisfy a componentwise error bound is a significant weakness of the method. Indeed Strassen’s method cannot even accurately multiply by the identity matrix. The product

is evaluated exactly in floating-point arithmetic by conventional multiplication, but Strassen’s method computes

Because  involves subterms of order unity, the error
involves subterms of order unity, the error  will be of order . Thus the relative error
will be of order . Thus the relative error  ,
,
Another weakness of Strassen’s method is that while the scaling  , where
, where  is diagonal, leaves (1) unchanged, it can alter (2) by an arbitrary amount. Dumitrescu (1998) suggests computing
is diagonal, leaves (1) unchanged, it can alter (2) by an arbitrary amount. Dumitrescu (1998) suggests computing  , where the diagonal matrices
, where the diagonal matrices  and
and  are chosen to equilibrate the rows of and the columns of in the
are chosen to equilibrate the rows of and the columns of in the  -norm; he shows that this scaling can improve the accuracy of the result. Further investigations along these lines are made by Ballard et al. (2016).
-norm; he shows that this scaling can improve the accuracy of the result. Further investigations along these lines are made by Ballard et al. (2016).
Should one use Strassen’s method in practice, assuming that an implementation is available that is faster than conventional multiplication? Not if one needs a componentwise error bound, which ensures accurate products of matrices with nonnegative entries and ensures that the column scaling of and row scaling of has no effect on the error. But if a normwise error bound with a faster growing constant than for conventional multiplication is acceptable then the method is worth considering.
Notes
For recent work on high-performance implementation of Strassen’s method see Huang et al. (2016, 2020).
Theorem 1 is from an unpublished technical report of Brent (1970). A proof can be found in Higham (2002, §23.2.2).
For more on fast matrix multiplication see Bini (2014) and Higham (2002, Chapter 23).
References
This is a minimal set of references, which contain further useful references within.
- Josh Alman and Virginia Vassilevska Williams. A refined laser method and faster matrix multiplication. In Proceedings of the 2021 ACM-SIAM Symposium on Discrete Algorithms (SODA), Society for Industrial and Applied Mathematics, January 2021, pages 522–539.
- Grey Ballard, Austin R. Benson, Alex Druinsky, Benjamin Lipshitz, and Oded Schwartz. Improving the numerical stability of fast matrix multiplication. SIAM J. Matrix Anal. Appl, 37(4):1382–1418, 2016.
- Benson, Alex Druinsky, Benjamin Lipshitz, and Oded Schwartz. Improving the numerical stability of fast matrix multiplication. SIAM J. Matrix Anal. Appl., 37(4):1382–1418, 2016.
- Dario A. Bini. Fast matrix multiplication. In Handbook of Linear Algebra, Leslie Hogben, editor, second edition, Chapman and Hall/CRC, Boca Raton, FL, USA, 2014, pages 61.1–61.17.
- Bogdan Dumitrescu. Improving and estimating the accuracy of Strassen’s algorithm. Numer. Math., 79:485–499, 1998.
- Nicholas J. Higham, Accuracy and Stability of Numerical Algorithms, second edition, Society for Industrial and Applied Mathematics, Philadelphia, PA, USA, 2002.
- Jianyu Huang, Tyler M. Smith, Greg M. Henry, and Robert A. van de Geijn. Strassen’s algorithm reloaded. In SC16: International Conference for High Performance Computing, Networking, Storage and Analysis, IEEE, November 2016.
- Jianyu Huang, Chenhan D. Yu, and Robert A. van de Geijn. Strassen’s algorithm reloaded on GPUs, ACM Trans. Math. Software, 46(1):1:1–1:22, 2020.
- Julian Laderman, Victor Pan, and Xuan-He Sha. On practical algorithms for accelerated matrix multiplication. Linear Algebra Appl., 162–164:557–588, 1992.
- François Le Gall. Powers of tensors and fast matrix multiplication. In Proceedings of the 39th International Symposium on Symbolic and Algebraic Computation, 2014, pages 296–303.
This article is part of the “What Is” series, available from https://nhigham.com/category/what-is and in PDF form from the GitHub repository https://github.com/higham/what-is.
lie in the union of the
be an eigenvalue of
a corresponding eigenvector and let
. From the
th equation in
we have
it follows that
.







![\notag \left[\begin{array}{ccccc} 5/4 & 1 & 3/4 & 1/2 & 1/4 \\ 1 & 0 & 0 & 0 & 0\\ -1 & 1 & 0 & 0 & 0\\ 0 & 0 & 1 & 3 & 0\\ 0 & 0 & 0 & 1/2 & 5 \end{array}\right]](https://s0.wp.com/latex.php?latex=%5Cnotag+%5Cleft%5B%5Cbegin%7Barray%7D%7Bccccc%7D+5%2F4+++++++++%26+1+%26+3%2F4+++++++++%26+1%2F2+++++++++%26+1%2F4++++++++%5C%5C+1+%26+0+%26+0+%26+0+%26+0%5C%5C+-1+%26+1+%26+0+%26+0+%26+0%5C%5C+0+%26+0+%26+1+%26+3+%26+0%5C%5C+0+%26+0+%26+0+%26+1%2F2+++++++++%26+5+%5Cend%7Barray%7D%5Cright%5D+&bg=ffffff&fg=222222&s=0&c=20201002)
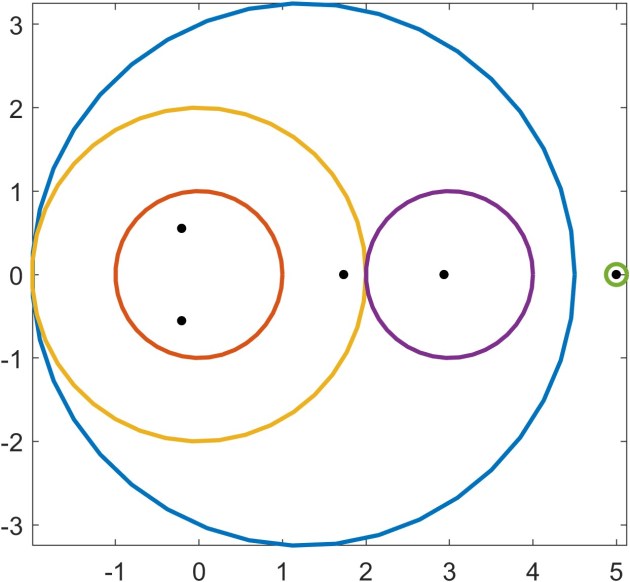
 The eigenvalues—three real and one complex conjugate pair—are the black dots. It happens that each disc contains an eigenvalue, but this is not always the case. For the matrix
The eigenvalues—three real and one complex conjugate pair—are the black dots. It happens that each disc contains an eigenvalue, but this is not always the case. For the matrix![\notag \left[\begin{array}{cc} 2 & -1\\ 2 & 0 \end{array}\right]](https://s0.wp.com/latex.php?latex=%5Cnotag+%5Cleft%5B%5Cbegin%7Barray%7D%7Bcc%7D+2+%26+-1%5C%5C+2+%26+0+%5Cend%7Barray%7D%5Cright%5D+&bg=ffffff&fg=222222&s=0&c=20201002)
 and the blue disc does not contain an eigenvalue. The next result, which is proved by a continuity argument, provides additional information that increases the utility of Gershgorin’s theorem. In particular it says that if a disc is disjoint from the other discs then it contains an eigenvalue.
and the blue disc does not contain an eigenvalue. The next result, which is proved by a continuity argument, provides additional information that increases the utility of Gershgorin’s theorem. In particular it says that if a disc is disjoint from the other discs then it contains an eigenvalue.




 for some positive integer
for some positive integer 
 is the
is the  instance of the upper bidiagonal
instance of the upper bidiagonal  matrix
matrix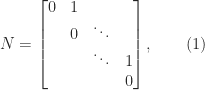

 . The superdiagonal of ones moves up to the right with each increase in the index of the power until it disappears off the top right corner of the matrix.
. The superdiagonal of ones moves up to the right with each increase in the index of the power until it disappears off the top right corner of the matrix. has rank
has rank  and was constructed using a general formula: if
and was constructed using a general formula: if  with
with  then
then  . We simply took orthogonal vectors
. We simply took orthogonal vectors ![x =[2, -4, 1]^T](https://s0.wp.com/latex.php?latex=x+%3D%5B2%2C+-4%2C+1%5D%5ET&bg=ffffff&fg=222222&s=0&c=20201002) and
and ![y = [1, 1, 2]^T](https://s0.wp.com/latex.php?latex=y+%3D+%5B1%2C+1%2C+2%5D%5ET&bg=ffffff&fg=222222&s=0&c=20201002) .
. with
with  implies
implies  or
or  . Consequently, the trace and determinant of a nilpotent matrix are both zero.
. Consequently, the trace and determinant of a nilpotent matrix are both zero. ), then
), then  , since such a matrix has a spectral decomposition
, since such a matrix has a spectral decomposition  and the matrix
and the matrix  is zero. It is only for nonnormal matrices that nilpotency is a nontrivial property, and the best way to understand it is with the Jordan canonical form (JCF). The JCF of a matrix with only zero eigenvalues has the form
is zero. It is only for nonnormal matrices that nilpotency is a nontrivial property, and the best way to understand it is with the Jordan canonical form (JCF). The JCF of a matrix with only zero eigenvalues has the form  , where
, where  , where
, where  is of the form (1) and hence
is of the form (1) and hence  . It follows that the index of nilpotency is
. It follows that the index of nilpotency is  .
. , attained when the JCF of
, attained when the JCF of  is attained when there is a Jordan block of size
is attained when there is a Jordan block of size  and all other blocks are
and all other blocks are  for
for  , which means that
, which means that  is singular, since
is singular, since  . But
. But
 , the eigenvalues of
, the eigenvalues of  , so if
, so if  .
.
 are upper triangular, that is,
are upper triangular, that is,  for
for  . For such a matrix the eigenvalues are the diagonal elements.
. For such a matrix the eigenvalues are the diagonal elements. ) or Hermitian matrix (
) or Hermitian matrix ( , where
, where  ) has real eigenvalues. A proof is
) has real eigenvalues. A proof is  so premultiplying the first equation by
so premultiplying the first equation by  and postmultiplying the second by
and postmultiplying the second by  and
and  , which means that
, which means that  , or
, or  since
since  . The matrix
. The matrix  ) or skew-Hermitian complex matrix (
) or skew-Hermitian complex matrix ( ) has pure imaginary eigenvalues. A proof is similar to the Hermitian case:
) has pure imaginary eigenvalues. A proof is similar to the Hermitian case:  and so
and so  is equal to both
is equal to both  and
and  , so
, so  . The matrix
. The matrix  above is skew-symmetric.
above is skew-symmetric. , because for any matrix norm
, because for any matrix norm  it can be shown that every eigenvalue satisfies
it can be shown that every eigenvalue satisfies  .
.
 for some nonsingular matrix
for some nonsingular matrix  with
with  the matrix of eigenvalues. If we write
the matrix of eigenvalues. If we write ![X = [x_1,x_2,\dots,x_n]](https://s0.wp.com/latex.php?latex=X+%3D+%5Bx_1%2Cx_2%2C%5Cdots%2Cx_n%5D&bg=ffffff&fg=222222&s=0&c=20201002) then
then  is equivalent to
is equivalent to  ,
,  , so the
, so the  are eigenvectors of
are eigenvectors of ![\left[\begin{smallmatrix}1 \\ 0 \end{smallmatrix}\right]](https://s0.wp.com/latex.php?latex=%5Cleft%5B%5Cbegin%7Bsmallmatrix%7D1+%5C%5C+0+%5Cend%7Bsmallmatrix%7D%5Cright%5D&bg=ffffff&fg=222222&s=0&c=20201002) (or any nonzero scalar multiple of it). This matrix is a Jordan block. The matrix
(or any nonzero scalar multiple of it). This matrix is a Jordan block. The matrix  takes both positive and negative values. By contrast, for a positive definite matrix
takes both positive and negative values. By contrast, for a positive definite matrix  for all nonzero
for all nonzero  for all nonzero
for all nonzero  for which
for which  .
. then
then  , where
, where  is the
is the  for all
for all  for all
for all 
 . When
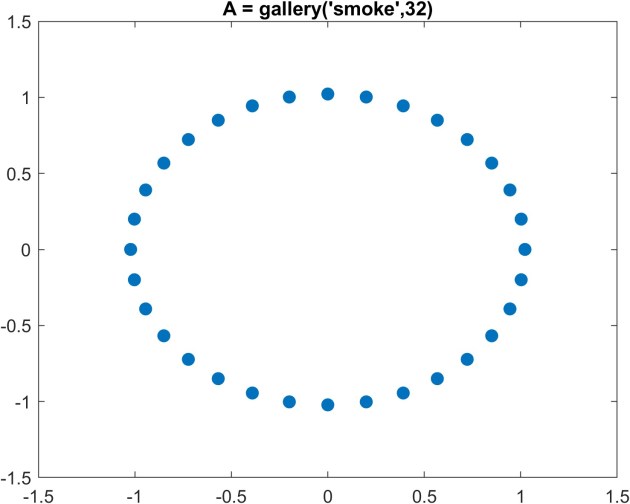
. When  . Another example is the
. Another example is the  , illustrated by
, illustrated by
 (exercise: how many
(exercise: how many  s?). A third example is a Toeplitz tridiagonal matrix with zero diagonal:
s?). A third example is a Toeplitz tridiagonal matrix with zero diagonal: with a symmetric indefinite matrix
with a symmetric indefinite matrix  , where
, where  is unit lower triangular and
is unit lower triangular and 
 blocks. We can compute a block
blocks. We can compute a block  factorization
factorization  , were
, were  is a permutation matrix,
is a permutation matrix,  is a Toeplitz matrix if
is a Toeplitz matrix if  for
for  parameters
parameters  . A Toeplitz matrix has constant diagonals. For
. A Toeplitz matrix has constant diagonals. For  :
:
 .
. can be solved in less than the
can be solved in less than the 
 . It follows that the product of two upper triangular Toeplitz matrices is again upper triangular Toeplitz, upper triangular Toeplitz matrices commute, and
. It follows that the product of two upper triangular Toeplitz matrices is again upper triangular Toeplitz, upper triangular Toeplitz matrices commute, and  is also an upper triangular Toeplitz matrix (assuming
is also an upper triangular Toeplitz matrix (assuming  is nonzero, so that
is nonzero, so that  is nonsingular).
is nonsingular).
 are
are
 , where
, where  is the matrix inverse. What is not always emphasized is that there are very few circumstances in which one should compute
is the matrix inverse. What is not always emphasized is that there are very few circumstances in which one should compute  ) system
) system  by computing
by computing  , but rather would carry out a division
, but rather would carry out a division  . In the
. In the  , where
, where  matrix with
matrix with  , satisfies the normal equations
, satisfies the normal equations  . It is therefore natural to form the symmetric positive definite matrix
. It is therefore natural to form the symmetric positive definite matrix  and solve the normal equations by Cholesky factorization. While fast, this method is numerically unstable when
and solve the normal equations by Cholesky factorization. While fast, this method is numerically unstable when 

 , in floating-point arithmetic
, in floating-point arithmetic  rounds to
rounds to 
 has been lost.
has been lost. , and in general the cost of the evaluation of a product depends on where one puts the parentheses. One order may be much superior to others, so one should not simply evaluate the product in a fixed left-right or right-left order. For example, if
, and in general the cost of the evaluation of a product depends on where one puts the parentheses. One order may be much superior to others, so one should not simply evaluate the product in a fixed left-right or right-left order. For example, if  are
are  can be evaluated as
can be evaluated as : a vector outer product followed by a matrix–vector product, costing
: a vector outer product followed by a matrix–vector product, costing  : a vector scalar product followed by a vector scaling, costing just
: a vector scalar product followed by a vector scaling, costing just  operations.
operations. in order to minimize the operation count is a
in order to minimize the operation count is a  ,
, for all
for all  ,
, factor is returned in the first argument, and it can be used to compute a direction of negative curvature (as needed in optimization), for example.
factor is returned in the first argument, and it can be used to compute a direction of negative curvature (as needed in optimization), for example. that exploit the block structure and possible sparsity in
that exploit the block structure and possible sparsity in 
 in
in  operations, rather than the
operations, rather than the  indicates a matrix that is nearly singular. However, the size of
indicates a matrix that is nearly singular. However, the size of  we can achieve any value for the determinant by multiplying by a scalar
we can achieve any value for the determinant by multiplying by a scalar  , yet
, yet  is no more or less nearly singular than
is no more or less nearly singular than  .
.
 , yet
, yet
 element of
element of  then the matrix becomes singular! By contrast,
then the matrix becomes singular! By contrast,  is always very well conditioned. The determinant cannot distinguish between the ill-conditioned
is always very well conditioned. The determinant cannot distinguish between the ill-conditioned  for all
for all  , where the
, where the  are the eigenvalue of
are the eigenvalue of  , it follows that the matrix condition number
, it follows that the matrix condition number  is bounded below by the ratio of largest to smallest eigenvalue in absolute value, that is,
is bounded below by the ratio of largest to smallest eigenvalue in absolute value, that is,

 is a singular value decomposition (SVD), with
is a singular value decomposition (SVD), with  orthogonal and
orthogonal and  ,
,  . If
. If  and
and  are the same, but in general the eigenvalues
are the same, but in general the eigenvalues  can be very different.
can be very different.

 , so that
, so that  is a unitary matrix. (
is a unitary matrix. ( is a Vandermonde matrix with points the roots of unity.) Specifically,
is a Vandermonde matrix with points the roots of unity.) Specifically,
 ). Moreover, the eigenvalues are given by
). Moreover, the eigenvalues are given by  , where
, where  is the first unit vector.
is the first unit vector. , where
, where  is the vector of ones.
is the vector of ones. flops, since multiplication by
flops, since multiplication by  , the
, the  version of which is
version of which is

 . The eigenvalues are
. The eigenvalues are  ,
,  , where
, where  . The matrix is singular when
. The matrix is singular when 
 (
(


{kind=link}
{kind=link}
{kind=link}