In many applications a matrix 








What is usually wanted is a factorization that displays how close

where 




and that the minimum is attained at

so 


Although the SVD is expensive to compute, it may not be significantly more expensive than alternative factorizations. However, the SVD is expensive to update when a row or column is added to or removed from the matrix, as happens repeatedly in signal processing applications.
Many different definitions of a rank-revealing factorization have been given, and they usually depend on a particular matrix factorization. We will use the following general definition.
Definition 1. A rank-revealing factorization (RRF) of

where
,
is diagonal and nonsingular, and
and
are well conditioned.
An RRF concentrates the rank deficiency and ill condition of

where 
Without loss of generality we can assume that

(since 



so 


Definition 2 is a strong requirement, since it requires all the singular values of
Numerical Rank
An RRF helps to determine the numerical rank, which we now define.
Definition 2. For a given
the numerical rank of
.
By the Eckart–Young theorem, the numerical rank is the smallest rank attained over all 




QR Factorization
One might attempt to compute an RRF by using a QR factorization 




However, it is easy to see that QR factorization in its basic form is flawed as a means for computing an RRF. Consider the matrix
which is a Jordan block with zero eigenvalue. This matrix is its own QR factorization (






![[a_1,a_2,a_3,a_4]](https://s0.wp.com/latex.php?latex=%5Ba_1%2Ca_2%2Ca_3%2Ca_4%5D&bg=ffffff&fg=222222&s=0&c=20201002)
![[a_2,a_3,a_4,a_1]](https://s0.wp.com/latex.php?latex=%5Ba_2%2Ca_3%2Ca_4%2Ca_1%5D&bg=ffffff&fg=222222&s=0&c=20201002)

For a less trivial example, consider the matrix
![\notag A = \left[\begin{array}{rrrr} 1 & 1 &\theta &0\\ 1 & -1 & 2 &1 \\ 1 & 0 &1+\theta &-1\\ 1 &-1 & 2 &-1 \end{array}\right], \quad \theta = 10^{-8}. \qquad (\dagger)](https://s0.wp.com/latex.php?latex=%5Cnotag+++A+%3D+%5Cleft%5B%5Cbegin%7Barray%7D%7Brrrr%7D++++++++1+%26+1++%26%5Ctheta+%260%5C%5C++++++++1+%26+-1+%26+2+%261+%5C%5C++++++++1+%26+0++%261%2B%5Ctheta+%26-1%5C%5C++++++++1+%26-1++%26+2+%26-1+++%5Cend%7Barray%7D%5Cright%5D%2C+%5Cquad+%5Ctheta+%3D+10%5E%7B-8%7D.+%5Cqquad+%28%5Cdagger%29+&bg=ffffff&fg=222222&s=0&c=20201002)
Computing the QR factorization we obtain
R =
-2.0000e+00 5.0000e-01 -2.5000e+00 5.0000e-01
0 1.6583e+00 -1.6583e+00 -1.5076e-01
0 0 -4.2640e-09 8.5280e-01
0 0 0 -1.4142e+00
The 



QR Factorization With Column Pivoting
A common method for computing an RRF is QR factorization with column pivoting, which for a matrix 

In particular,

If 
![\notag R = \begin{array}[b]{@{\mskip33mu}c@{\mskip-16mu}c@{\mskip-10mu}c@{}} \scriptstyle k & \scriptstyle n-k & \\ \multicolumn{2}{c}{ \left[\begin{array}{c@{~}c@{~}} R_{11}& R_{12} \\ 0 & R_{22} \\ \end{array}\right]} & \mskip-12mu\ \begin{array}{c} \scriptstyle k \\ \scriptstyle n-k \end{array} \end{array}, \qquad(4)](https://s0.wp.com/latex.php?latex=%5Cnotag++++R+%3D++++%5Cbegin%7Barray%7D%5Bb%5D%7B%40%7B%5Cmskip33mu%7Dc%40%7B%5Cmskip-16mu%7Dc%40%7B%5Cmskip-10mu%7Dc%40%7B%7D%7D++++%5Cscriptstyle+k+%26++++%5Cscriptstyle+n-k+%26++++%5C%5C++++%5Cmulticolumn%7B2%7D%7Bc%7D%7B++++++++%5Cleft%5B%5Cbegin%7Barray%7D%7Bc%40%7B%7E%7Dc%40%7B%7E%7D%7D++++++++++++++++++R_%7B11%7D%26+R_%7B12%7D+%5C%5C++++++++++++++++++++0+++%26+R_%7B22%7D+%5C%5C++++++++++++++%5Cend%7Barray%7D%5Cright%5D%7D++++%26+%5Cmskip-12mu%5C++++++++++%5Cbegin%7Barray%7D%7Bc%7D++++++++++++++%5Cscriptstyle+k+%5C%5C++++++++++++++%5Cscriptstyle+n-k++++++++++++++%5Cend%7Barray%7D++++%5Cend%7Barray%7D%2C++%5Cqquad%284%29+&bg=ffffff&fg=222222&s=0&c=20201002)
with

Hence 
![\left[\begin{smallmatrix} R_{11} & R_{12} \\ 0 & 0 \end{smallmatrix}\right]](https://s0.wp.com/latex.php?latex=%5Cleft%5B%5Cbegin%7Bsmallmatrix%7D+R_%7B11%7D+%26+R_%7B12%7D+%5C%5C+0+%26+0+%5Cend%7Bsmallmatrix%7D%5Cright%5D&bg=ffffff&fg=222222&s=0&c=20201002)
![Q = [Q_1~Q_2]](https://s0.wp.com/latex.php?latex=Q+%3D+%5BQ_1%7EQ_2%5D&bg=ffffff&fg=222222&s=0&c=20201002)


so ![\| A\Pi - Q_1 [R_{11}~R_{12}]\|_2 \le \|R_{22}\|_2](https://s0.wp.com/latex.php?latex=%5C%7C+A%5CPi+-+Q_1+%5BR_%7B11%7D%7ER_%7B12%7D%5D%5C%7C_2+%5Cle+%5C%7CR_%7B22%7D%5C%7C_2&bg=ffffff&fg=222222&s=0&c=20201002)


To assess how good an RRF this factorization is (with 

Applying (1) gives

where 





The lower bound is an approximate equality for small 
devised by Kahan, which is invariant under QR factorization with column pivoting. Therefore QR factorization with column pivoting is not guaranteed to reveal the rank, and indeed it can fail to do so by an exponentially large factor.
For the matrix 
![A\Pi = [a_3,~a_4,~a_2,~a_1]](https://s0.wp.com/latex.php?latex=A%5CPi+%3D+%5Ba_3%2C%7Ea_4%2C%7Ea_2%2C%7Ea_1%5D&bg=ffffff&fg=222222&s=0&c=20201002)
R =
-3.0000e+00 3.3333e-01 1.3333e+00 -1.6667e+00
0 -1.6997e+00 2.6149e-01 2.6149e-01
0 0 1.0742e+00 1.0742e+00
0 0 0 3.6515e-09
This 



QR Factorization with Other Pivoting Choices
Consider a 
![\notag R = \begin{array}[b]{@{\mskip33mu}c@{\mskip-16mu}c@{\mskip-10mu}c@{}} \scriptstyle k & \scriptstyle n-k & \\ \multicolumn{2}{c}{ \left[\begin{array}{c@{~}c@{~}} R_{11}& R_{12} \\ 0 & R_{22} \\ \end{array}\right]} & \mskip-12mu\ \begin{array}{c} \scriptstyle k \\ \scriptstyle n-k \end{array} \end{array}. \qquad (6)](https://s0.wp.com/latex.php?latex=%5Cnotag++++R+%3D++++%5Cbegin%7Barray%7D%5Bb%5D%7B%40%7B%5Cmskip33mu%7Dc%40%7B%5Cmskip-16mu%7Dc%40%7B%5Cmskip-10mu%7Dc%40%7B%7D%7D++++%5Cscriptstyle+k+%26++++%5Cscriptstyle+n-k+%26++++%5C%5C++++%5Cmulticolumn%7B2%7D%7Bc%7D%7B++++++++%5Cleft%5B%5Cbegin%7Barray%7D%7Bc%40%7B%7E%7Dc%40%7B%7E%7D%7D++++++++++++++++++R_%7B11%7D%26+R_%7B12%7D+%5C%5C++++++++++++++++++++0+++%26+R_%7B22%7D+%5C%5C++++++++++++++%5Cend%7Barray%7D%5Cright%5D%7D++++%26+%5Cmskip-12mu%5C++++++++++%5Cbegin%7Barray%7D%7Bc%7D++++++++++++++%5Cscriptstyle+k+%5C%5C++++++++++++++%5Cscriptstyle+n-k++++++++++++++%5Cend%7Barray%7D++++%5Cend%7Barray%7D.+%5Cqquad+%286%29+&bg=ffffff&fg=222222&s=0&c=20201002)
We have

where (7) is from singular value interlacing inequalities and (8) follows from the Eckart-Young theorem, since setting 


In view of the inequalities (7) and (8) this means that we wish to choose 

Some theoretical results are available on the existence of such QR factorizations. First, we give a result that shows that for 

Theorem 1. For
and
, where
.
Proof. Let
, with
and let
be such that
satisfies
. Then if

since
, which yields the result.
Next, we write
, where
, and partition

with
. Then
implies
. On the other hand, if
is an SVD with
,
, and
then

so

Finally, we note that we can partition the orthogonal matrix
as
and the CS decomposition implies that

Hence
, as required.

Theorem 1 is a special case of the next result of Hong and Pan (1992).
Theorem 2. For

where
.
The proof of Theorem 2 is constructive and chooses 

Theorem 2 shows the existence of an RRF up to the factor 
Much work has been done on algorithms that choose the permutation matrix 
UTV Decomposition
By applying Householder transformations on the right, a QR factorization with column pivoting can be turned into a complete orthogonal decomposition of
where 


The UTV decomposition is easy to update (when a row is added) and downdate (when a row is removed) using Givens rotations and it is suitable for parallel implementation. Initial determination of the UTV decomposition can be done by applying the updating algorithm as the rows are brought in one at a time.
LU Factorization
Instead of QR factorization we can build an RRF from an LU factorization with pivoting. For

where 












A result of Pan (2000) shows that an RRF based on LU factorization always exists up to a modest factor 
Theorem 3 For
![\notag \Pi_1 A \Pi_2 = LU = \begin{bmatrix} L_{11} & 0 \\ L_{12} & I_{m-k,n-k} \end{bmatrix} \begin{array}[b]{@{\mskip33mu}c@{\mskip-16mu}c@{\mskip-10mu}c@{}} \scriptstyle k & \scriptstyle n-k & \\ \multicolumn{2}{c}{ \left[\begin{array}{c@{~}c@{~}} U_{11}& U_{12} \\ 0 & U_{22} \\ \end{array}\right]} & \mskip-12mu\ \begin{array}{c} \scriptstyle k \\ \scriptstyle n-k \end{array} \end{array},](https://s0.wp.com/latex.php?latex=%5Cnotag+++++%5CPi_1+A+%5CPi_2+%3D+LU+%3D+++++%5Cbegin%7Bbmatrix%7D+++++L_%7B11%7D+%26++0++++%5C%5C+++++L_%7B12%7D+%26+I_%7Bm-k%2Cn-k%7D+++++%5Cend%7Bbmatrix%7D++++%5Cbegin%7Barray%7D%5Bb%5D%7B%40%7B%5Cmskip33mu%7Dc%40%7B%5Cmskip-16mu%7Dc%40%7B%5Cmskip-10mu%7Dc%40%7B%7D%7D++++%5Cscriptstyle+k+%26++++%5Cscriptstyle+n-k+%26++++%5C%5C++++%5Cmulticolumn%7B2%7D%7Bc%7D%7B++++++++%5Cleft%5B%5Cbegin%7Barray%7D%7Bc%40%7B%7E%7Dc%40%7B%7E%7D%7D++++++++++++++++++U_%7B11%7D%26+U_%7B12%7D+%5C%5C++++++++++++++++++++0+++%26+U_%7B22%7D+%5C%5C++++++++++++++%5Cend%7Barray%7D%5Cright%5D%7D++++%26+%5Cmskip-12mu%5C++++++++++%5Cbegin%7Barray%7D%7Bc%7D++++++++++++++%5Cscriptstyle+k+%5C%5C++++++++++++++%5Cscriptstyle+n-k++++++++++++++%5Cend%7Barray%7D++++%5Cend%7Barray%7D%2C+&bg=ffffff&fg=222222&s=0&c=20201002)
where

where
.
Again the proof is constructive, but the permutations it chooses are too expensive to compute. In practice, complete pivoting often yields a good RRF.
In terms of Definition 1, an RRF has

For the matrix (
U =
1.0000e+00 1.0000e+00 1.0000e-08 0
0 -2.0000e+00 2.0000e+00 1.0000e+00
0 0 5.0000e-09 -1.5000e+00
0 0 0 -2.0000e+00
As for QR factorization without pivoting, an RRF is not obtained from 
U =
2.0000e+00 1.0000e+00 -1.0000e+00 1.0000e+00
0 -2.0000e+00 0 0
0 0 1.0000e+00 1.0000e+00
0 0 0 -5.0000e-09
which yields a very good RRF 

Notes
QR factorization with column pivoting is difficult to implement efficiently, as the criterion for choosing the pivots requires the norms of the active parts of the remaining columns and this requires a significant amount of data movement. In recent years, randomized RRF algorithms have been developed that use projections with random matrices to make pivot decisions based on small sample matrices and thereby reduce the amount of data movement. See, for example, Martinsson et al. (2019).
References
This is a minimal set of references, which contain further useful references within.
- Shivkumar Chandrasekaran and Ilse C. F. Ipsen, On Rank-Revealing Factorisations, SIAM J. Matrix Anal. Appl. 15 (2), 592–622, 1994
- Y. P. Hong and C.-T. Pan, Rank-Revealing QR Factorizations and the Singular Value Decomposition, Math. Comp. 58 (197), 213–232, 1992.
- P. G. Martinsson, G. Quintana-Orti, and N. Heavner, randUTV: A Blocked Randomized Algorithm for Computing a Rank-Revealing UTV Factorization, ACM Trans. Math. Software 45(1), 4:1–4:26, 2019.
- C.-T. Pan, On the Existence and Computation of Rank-Revealing LU Factorizations, Linear Algebra Appl. 316, 199–222, 2000.
- G. W. Stewart, Matrix Algorithms. Volume I: Basic Decompositions, Society for Industrial and Applied Mathematics, Philadelphia, PA, USA, 1998.
Related Blog Posts
- What Is the CS Decomposition? (2020)
- What Is an LU Factorization? (2021)
- What Is a QR Factorization? (2020)
- What Is the Singular Value Decomposition? (2020)
This article is part of the “What Is” series, available from https://nhigham.com/category/what-is and in PDF form from the GitHub repository https://github.com/higham/what-is.
 is pseudo-orthogonal if
is pseudo-orthogonal if
 is a signature matrix. A matrix
is a signature matrix. A matrix  -orthogonal matrix, where
-orthogonal matrix, where  then
then  is also pseudo-orthogonal. Furthermore,
is also pseudo-orthogonal. Furthermore, 
 is orthogonal, this equation implies that
is orthogonal, this equation implies that  and hence that
and hence that
 and
and ![\Sigma = \left[\begin{smallmatrix}1 & 0 \\ 0 & -1 \end{smallmatrix}\right]](https://s0.wp.com/latex.php?latex=%5CSigma+%3D+%5Cleft%5B%5Cbegin%7Bsmallmatrix%7D1+%26+0+%5C%5C+0+%26+-1+%5Cend%7Bsmallmatrix%7D%5Cright%5D&bg=ffffff&fg=222222&s=0&c=20201002) ,
, 

 matrices with
matrices with  .
. is an eigenvalue of
is an eigenvalue of  is also an eigenvalue and it has the same algebraic and geometric multiplicities as
is also an eigenvalue and it has the same algebraic and geometric multiplicities as 
 , which means that
, which means that  , and any such orthogonal matrix is pseudo-orthogonal.
, and any such orthogonal matrix is pseudo-orthogonal. of a symmetric positive definite
of a symmetric positive definite  and want the Cholesky factorization of
and want the Cholesky factorization of  , which is assumed to be symmetric positive definite. A more general downdating problem is that we are given
, which is assumed to be symmetric positive definite. A more general downdating problem is that we are given![\notag A = \begin{array}[b]{cc} \left[\begin{array}{@{}c@{}} A_1\\ A_2 \end{array}\right] & \mskip-22mu\ \begin{array}{l} \scriptstyle p \\ \scriptstyle q \end{array} \end{array}, \quad p\ge n,](https://s0.wp.com/latex.php?latex=%5Cnotag+++A+%3D+%5Cbegin%7Barray%7D%5Bb%5D%7Bcc%7D++++++++%5Cleft%5B%5Cbegin%7Barray%7D%7B%40%7B%7Dc%40%7B%7D%7D++++++++++++++++++A_1%5C%5C++++++++++++++++++A_2++++++++++++++%5Cend%7Barray%7D%5Cright%5D++++++++%26+%5Cmskip-22mu%5C++++++++++%5Cbegin%7Barray%7D%7Bl%7D++++++++++++++%5Cscriptstyle+p+%5C%5C++++++++++++++%5Cscriptstyle+q++++++++++%5Cend%7Barray%7D++++%5Cend%7Barray%7D%2C++++%5Cquad+p%5Cge+n%2C+&bg=ffffff&fg=222222&s=0&c=20201002)
 and wish to obtain the Cholesky factor
and wish to obtain the Cholesky factor  of
of  . Note that
. Note that  have been removed. The simple case above corresponds to removing one row (
have been removed. The simple case above corresponds to removing one row ( ). Assuming that
). Assuming that  , we would like to obtain
, we would like to obtain  . If we can find a pseudo-orthogonal matrix
. If we can find a pseudo-orthogonal matrix 
 upper triangular, then
upper triangular, then
 hyperbolic rotation has the form (4), and an
hyperbolic rotation has the form (4), and an  hyperbolic rotation embedded in it at the intersection of rows and columns
hyperbolic rotation embedded in it at the intersection of rows and columns  and
and  , for some
, for some  and
and  has the form
has the form ![QA = \left[\begin{smallmatrix} R \\ 0 \end{smallmatrix}\right]](https://s0.wp.com/latex.php?latex=QA+%3D+%5Cleft%5B%5Cbegin%7Bsmallmatrix%7D+R+%5C%5C+0+%5Cend%7Bsmallmatrix%7D%5Cright%5D&bg=ffffff&fg=222222&s=0&c=20201002) with
with  and
and  upper triangular. The factorization exists if
upper triangular. The factorization exists if  is positive definite.
is positive definite.
 are given, and
are given, and  . For
. For  or
or  we have the standard least squares (LS) problem and the quadratic form is definite, while for
we have the standard least squares (LS) problem and the quadratic form is definite, while for  the problem is to minimize a genuinely indefinite quadratic form. This problem arises, for example, in the area of optimization known as
the problem is to minimize a genuinely indefinite quadratic form. This problem arises, for example, in the area of optimization known as  smoothing.
smoothing. , and since the Hessian matrix of the quadratic objective function in (7) is
, and since the Hessian matrix of the quadratic objective function in (7) is 
 , where
, where  comprises the first
comprises the first  components of
components of  . The same equation can also be obtained without using the normal equations by substituting the hyperbolic QR factorization into (7).
. The same equation can also be obtained without using the normal equations by substituting the hyperbolic QR factorization into (7). with
with  , partition
, partition![\notag A = \mskip5mu \begin{array}[b]{@{\mskip-20mu}c@{\mskip0mu}c@{\mskip-1mu}c@{}} & \mskip10mu\scriptstyle p & \scriptstyle q \\ \mskip15mu \begin{array}{r} \scriptstyle p \\ \scriptstyle q \end{array}~ & \multicolumn{2}{c}{\mskip-15mu \left[\begin{array}{c@{~}c@{~}} A_{11} & A_{12}\\ A_{21} & A_{22} \end{array}\right] } \end{array}, \qquad (8)](https://s0.wp.com/latex.php?latex=%5Cnotag+++A++%3D+%5Cmskip5mu++++%5Cbegin%7Barray%7D%5Bb%5D%7B%40%7B%5Cmskip-20mu%7Dc%40%7B%5Cmskip0mu%7Dc%40%7B%5Cmskip-1mu%7Dc%40%7B%7D%7D++++%26+%5Cmskip10mu%5Cscriptstyle+p+%26+%5Cscriptstyle+q+%5C%5C+++++++%5Cmskip15mu++++++++++%5Cbegin%7Barray%7D%7Br%7D++++++++++++++%5Cscriptstyle+p+%5C%5C++++++++++++++%5Cscriptstyle+q++++++++++%5Cend%7Barray%7D%7E++++%26+++++++%5Cmulticolumn%7B2%7D%7Bc%7D%7B%5Cmskip-15mu++++++++++%5Cleft%5B%5Cbegin%7Barray%7D%7Bc%40%7B%7E%7Dc%40%7B%7E%7D%7D++++++++++++++++++A_%7B11%7D+%26+A_%7B12%7D%5C%5C++++++++++++++++++A_%7B21%7D+%26+A_%7B22%7D++++++++++++++++%5Cend%7Barray%7D%5Cright%5D+++++++%7D++++%5Cend%7Barray%7D%2C+%5Cqquad+%288%29+&bg=ffffff&fg=222222&s=0&c=20201002)
 is nonsingular. The exchange operator is defined by
is nonsingular. The exchange operator is defined by


 .
. exists then
exists then  .
.
 and then eliminating
and then eliminating 
 , we have
, we have
 there is a unique
there is a unique  and
and  , which implies by (10) that
, which implies by (10) that  , which implies that
, which implies that  , it follows that
, it follows that  also has a nonsingular
also has a nonsingular  block and so
block and so  . But (9) shows that
. But (9) shows that  , and we conclude that
, and we conclude that  exists and Lemma 1 shows that
exists and Lemma 1 shows that  . Hence, using (9),
. Hence, using (9),
 be pseudo-orthogonal with respect to
be pseudo-orthogonal with respect to ![\notag Q = \begin{array}[b]{@{\mskip33mu}c@{\mskip-16mu}c@{\mskip-10mu}c@{}} \scriptstyle p & \scriptstyle n-p & \\ \multicolumn{2}{c}{ \left[\begin{array}{c@{~}c@{~}} Q_{11}& Q_{12} \\ Q_{21}& Q_{22} \\ \end{array}\right]} & \mskip-12mu\ \begin{array}{c} \scriptstyle p \\ \scriptstyle n-p \end{array} \end{array}, \quad p \le \displaystyle\frac{n}{2}.](https://s0.wp.com/latex.php?latex=%5Cnotag++++Q+%3D++++%5Cbegin%7Barray%7D%5Bb%5D%7B%40%7B%5Cmskip33mu%7Dc%40%7B%5Cmskip-16mu%7Dc%40%7B%5Cmskip-10mu%7Dc%40%7B%7D%7D++++%5Cscriptstyle+p+%26++++%5Cscriptstyle+n-p+%26++++%5C%5C++++%5Cmulticolumn%7B2%7D%7Bc%7D%7B++++++++%5Cleft%5B%5Cbegin%7Barray%7D%7Bc%40%7B%7E%7Dc%40%7B%7E%7D%7D++++++++++++++++++Q_%7B11%7D%26+Q_%7B12%7D+%5C%5C++++++++++++++++++Q_%7B21%7D%26+Q_%7B22%7D+%5C%5C++++++++++++++%5Cend%7Barray%7D%5Cright%5D%7D++++%26+%5Cmskip-12mu%5C++++++++++%5Cbegin%7Barray%7D%7Bc%7D++++++++++++++%5Cscriptstyle+p+%5C%5C++++++++++++++%5Cscriptstyle+n-p++++++++++++++%5Cend%7Barray%7D++++%5Cend%7Barray%7D%2C+%5Cquad+p+%5Cle+%5Cdisplaystyle%5Cfrac%7Bn%7D%7B2%7D.+&bg=ffffff&fg=222222&s=0&c=20201002)
 and
and  such that
such that![\notag \begin{bmatrix} U_1^T & 0\\ 0 & U_2^T \end{bmatrix} \begin{bmatrix} Q_{11} & Q_{12}\\ Q_{21} & Q_{22} \end{bmatrix} \begin{bmatrix} V_1 & 0\\ 0 & V_2 \end{bmatrix} = \begin{array}[b]{@{\mskip35mu}c@{\mskip30mu}c@{\mskip-10mu}c@{}c} \scriptstyle p & \scriptstyle p & \scriptstyle n-2p & \\ \multicolumn{3}{c}{ \left[\begin{array}{c@{~}|c@{~}c} C & -S & 0 \\ \hline -S & C & 0 \\ 0 & 0 & I_{n-2p} \end{array}\right]} & \mskip-12mu \begin{array}{c} \scriptstyle p \\ \scriptstyle p \\ \scriptstyle n-2p \end{array} \end{array}, \qquad (11)](https://s0.wp.com/latex.php?latex=%5Cnotag++++%5Cbegin%7Bbmatrix%7D++U_1%5ET+%26+0%5C%5C++++++++++++++++++++++++++0+++%26+U_2%5ET++++%5Cend%7Bbmatrix%7D++++%5Cbegin%7Bbmatrix%7D++Q_%7B11%7D+%26+Q_%7B12%7D%5C%5C++++++++++++++++++++++++++Q_%7B21%7D+%26+Q_%7B22%7D++++%5Cend%7Bbmatrix%7D++++%5Cbegin%7Bbmatrix%7D++V_1+%26+0%5C%5C++++++++++++++++++++++++++0+++%26+V_2++++%5Cend%7Bbmatrix%7D++++%3D++++%5Cbegin%7Barray%7D%5Bb%5D%7B%40%7B%5Cmskip35mu%7Dc%40%7B%5Cmskip30mu%7Dc%40%7B%5Cmskip-10mu%7Dc%40%7B%7Dc%7D++++%5Cscriptstyle+p+%26++++%5Cscriptstyle+p+%26++++%5Cscriptstyle+n-2p+%26++++%5C%5C++++%5Cmulticolumn%7B3%7D%7Bc%7D%7B++++%5Cleft%5B%5Cbegin%7Barray%7D%7Bc%40%7B%7E%7D%7Cc%40%7B%7E%7Dc%7D++++C+%26+++-S++++++%26+0+++%5C%5C++++%5Chline+++-S+%26++++C++++++%26+0+++%5C%5C++++0+%26++++0++++++%26+I_%7Bn-2p%7D++++%5Cend%7Barray%7D%5Cright%5D%7D++++%26+%5Cmskip-12mu++++%5Cbegin%7Barray%7D%7Bc%7D++++%5Cscriptstyle+p+%5C%5C++++%5Cscriptstyle+p+%5C%5C++++%5Cscriptstyle+n-2p++++%5Cend%7Barray%7D++++%5Cend%7Barray%7D%2C+%5Cqquad+%2811%29+&bg=ffffff&fg=222222&s=0&c=20201002)
 ,
,  , and
, and  , with
, with  for all
for all  .
.![\left[\begin{smallmatrix}C & -S \\ -S & C \end{smallmatrix}\right]](https://s0.wp.com/latex.php?latex=%5Cleft%5B%5Cbegin%7Bsmallmatrix%7DC+%26+-S+%5C%5C+-S+%26+C+%5Cend%7Bsmallmatrix%7D%5Cright%5D&bg=ffffff&fg=222222&s=0&c=20201002) in (11) generalizes the
in (11) generalizes the 
 for all
for all  singular values occur in reciprocal pairs, hence the largest and smallest singular values satisfy
singular values occur in reciprocal pairs, hence the largest and smallest singular values satisfy  (with strict inequality unless
(with strict inequality unless  ). This gives another proof of (3).
). This gives another proof of (3). for
for  . More results for pseudo-orthogonal matrices can be obtained as special cases of results for automorphism groups of general scalar products. See, for example, Mackey, Mackey, and Tisseur (2006).
. More results for pseudo-orthogonal matrices can be obtained as special cases of results for automorphism groups of general scalar products. See, for example, Mackey, Mackey, and Tisseur (2006). the set of pseudo-orthogonal matrices is known to have four connected components, a topological property that can be proved using the hyperbolic CS decomposition (Motlaghian, Armandnejad, and Hall, 2018).
the set of pseudo-orthogonal matrices is known to have four connected components, a topological property that can be proved using the hyperbolic CS decomposition (Motlaghian, Armandnejad, and Hall, 2018). such that
such that  . These correspond to the automorphism group of the scalar product
. These correspond to the automorphism group of the scalar product  for
for  . The results we have discussed generalize in a straightforward way to pseudo-unitary matrices.
. The results we have discussed generalize in a straightforward way to pseudo-unitary matrices. , where
, where ![\notag \left[\begin{array}{rrrr} 3 & -1 & 1 & 1\\ -1 & 3 & 1 & -1\\ -1 & -1 & 3 & 1\\ 1 & 1 & 1 & 3 \end{array}\right] = \left[\begin{array}{rrrr} 1 & 0 & 0 & 0\\ -\frac{1}{3} & 1 & 0 & 0\\ -\frac{1}{3} & -\frac{1}{2} & 1 & 0\\ \frac{1}{3} & \frac{1}{2} & 0 & 1 \end{array}\right] \left[\begin{array}{rrrr} 3 & -1 & 1 & 1\\ 0 & \frac{8}{3} & \frac{4}{3} & -\frac{2}{3}\\ 0 & 0 & 4 & 1\\ 0 & 0 & 0 & 3 \end{array}\right]. \qquad (1)](https://s0.wp.com/latex.php?latex=%5Cnotag++++%5Cleft%5B%5Cbegin%7Barray%7D%7Brrrr%7D++++++3+%26+-1+%26+1+%26+1%5C%5C+++++-1+%26+3+%26+1+%26+-1%5C%5C+++++-1+%26+-1+%26+3+%26+1%5C%5C++++++1+%26+1+%26+1+%26+3++++%5Cend%7Barray%7D%5Cright%5D+++%3D++++%5Cleft%5B%5Cbegin%7Barray%7D%7Brrrr%7D+++++1+%26+0+%26+0+%26+0%5C%5C++++-%5Cfrac%7B1%7D%7B3%7D+%26+1+%26+0+%26+0%5C%5C++++-%5Cfrac%7B1%7D%7B3%7D+%26+-%5Cfrac%7B1%7D%7B2%7D+%26+1+%26+0%5C%5C+++++%5Cfrac%7B1%7D%7B3%7D+%26+%5Cfrac%7B1%7D%7B2%7D+%26+0+%26+1++++%5Cend%7Barray%7D%5Cright%5D++++%5Cleft%5B%5Cbegin%7Barray%7D%7Brrrr%7D++++3+%26+-1+%26+1+%26+1%5C%5C++++0+%26+%5Cfrac%7B8%7D%7B3%7D+%26+%5Cfrac%7B4%7D%7B3%7D+%26+-%5Cfrac%7B2%7D%7B3%7D%5C%5C++++0+%26+0+%26+4+%26+1%5C%5C++++0+%26+0+%26+0+%26+3++++%5Cend%7Barray%7D%5Cright%5D.+%5Cqquad+%281%29+&bg=ffffff&fg=222222&s=0&c=20201002)
 reduces to solving the triangular systems
reduces to solving the triangular systems  and
and  , since then
, since then  .
. the leading principal submatrix of
the leading principal submatrix of  . If
. If  then the factorization may exist, but if so it is not unique.
then the factorization may exist, but if so it is not unique. then the
then the  are necessarily nonsingular and so
are necessarily nonsingular and so  . The left side of this equation is unit lower triangular and the right side is upper triangular; therefore both sides must equal the identity matrix, which means that
. The left side of this equation is unit lower triangular and the right side is upper triangular; therefore both sides must equal the identity matrix, which means that  and
and  , as required.
, as required. , which implies that
, which implies that  . Hence
. Hence  . In fact, such determinantal formulas hold for all the elements of
. In fact, such determinantal formulas hold for all the elements of ![\notag \begin{aligned} \ell_{ij} &= \frac{ \det\bigl( A( [1:j-1, \, i], 1:j ) \bigr) }{ \det( A_j ) }, \quad i > j, \\ u_{ij} &= \frac{ \det\bigl( A( 1:i, [1:i-1, \, j] ) \bigr) } { \det( A_{i-1} ) }, \quad i \le j. \end{aligned}](https://s0.wp.com/latex.php?latex=%5Cnotag++++%5Cbegin%7Baligned%7D++++%5Cell_%7Bij%7D+%26%3D+%5Cfrac%7B+%5Cdet%5Cbigl%28+A%28+%5B1%3Aj-1%2C+%5C%2C+i%5D%2C+1%3Aj+%29+%5Cbigr%29+%7D%7B+%5Cdet%28+A_j+%29+%7D%2C+++++++++++++%5Cquad+i+%3E+j%2C+%5C%5C++++u_%7Bij%7D+%26%3D+%5Cfrac%7B+%5Cdet%5Cbigl%28+A%28+1%3Ai%2C+%5B1%3Ai-1%2C+%5C%2C+j%5D+%29+%5Cbigr%29+%7D+++++++++++++++++++%7B+%5Cdet%28+A_%7Bi-1%7D+%29+%7D%2C+++++++++++++%5Cquad+i+%5Cle+j.++++%5Cend%7Baligned%7D+&bg=ffffff&fg=222222&s=0&c=20201002)
 , where
, where  and
and  are vectors of subscripts, denotes the submatrix formed from the intersection of the rows indexed by
are vectors of subscripts, denotes the submatrix formed from the intersection of the rows indexed by  to upper triangular form
to upper triangular form  in
in  stages. At the
stages. At the 
 are the multipliers. Of course each
are the multipliers. Of course each  must be nonzero for these formulas to be defined, and this is connected with the conditions of Theorem 1, since
must be nonzero for these formulas to be defined, and this is connected with the conditions of Theorem 1, since  . The final
. The final  for
for  , and
, and  for
for  , that is, the multipliers make up the
, that is, the multipliers make up the  we can just solve
we can just solve  and
and  , re-using the LU factorization. Similarly, solving
, re-using the LU factorization. Similarly, solving  reduces to solving the triangular systems
reduces to solving the triangular systems  and
and  .
. then determines the first column of
then determines the first column of  . This leads to the Doolittle method, which involves inner products of partial rows of
. This leads to the Doolittle method, which involves inner products of partial rows of 
 ordering of the loops in the factorization is the basis of early Fortran implementations of LU factorization, such as that in LINPACK. The inner loop travels down the columns of
ordering of the loops in the factorization is the basis of early Fortran implementations of LU factorization, such as that in LINPACK. The inner loop travels down the columns of  ordering, which updates the matrix a row at a time, and is appropriate for a language such as C that stores arrays by row.
ordering, which updates the matrix a row at a time, and is appropriate for a language such as C that stores arrays by row. and
and  orderings correspond to the Doolittle method. The last two of the
orderings correspond to the Doolittle method. The last two of the  orderings are the
orderings are the  and
and  orderings, to which we will return later.
orderings, to which we will return later. we can write
we can write
 matrix
matrix  is called the Schur complement of
is called the Schur complement of  in
in  and
and  have the correct forms for a unit lower triangular matrix and an upper triangular matrix, respectively. If we can find an LU factorization
have the correct forms for a unit lower triangular matrix and an upper triangular matrix, respectively. If we can find an LU factorization  then
then
 . If we can show that the Schur complement inherits the same structure then it follows by induction that we can compute the factorization for
. If we can show that the Schur complement inherits the same structure then it follows by induction that we can compute the factorization for  and
and  -matrices,
-matrices, if
if  for
for  and lower bandwidth
and lower bandwidth  if
if  . Another use of (2) is to show that
. Another use of (2) is to show that  and
and  have only
have only  :
:
 . This leads to the following algorithm:
. This leads to the following algorithm: .
. for
for  .
. for
for  .
. .
. .
. partitioning, in which we assume we have already computed the first block column of
partitioning, in which we assume we have already computed the first block column of 
 .
. for
for  .
. —
— .
. lower triangular and
lower triangular and  , where
, where 
![\notag A = \left[ \begin{array}{rr|rr} 0 & 1 & 1 & 1 \\ -1 & 1 & 1 & 1 \\\hline -2 & 3 & 4 & 2 \\ -1 & 2 & 1 & 3 \\ \end{array} \right] = \left[ \begin{array}{cc|cc} 1 & 0 & 0 & 0 \\ 0 & 1 & 0 & 0 \\\hline 1 & 2 & 1 & 0 \\ 1 & 1 & 0 & 1 \\ \end{array} \right] \left[ \begin{array}{rr|rr} 0 & 1 & 1 & 1 \\ -1 & 1 & 1 & 1 \\\hline 0 & 0 & 1 & -1 \\ 0 & 0 & -1 & 1 \\ \end{array} \right].](https://s0.wp.com/latex.php?latex=%5Cnotag+++++A+%3D++++++%5Cleft%5B+%5Cbegin%7Barray%7D%7Brr%7Crr%7D++++++0++%26++1++%26++1++%26++1++%5C%5C+++++-1++%26++1++%26++1++%26++1++%5C%5C%5Chline+++++-2++%26++3++%26++4++%26++2++%5C%5C+++++-1++%26++2++%26++1++%26++3++%5C%5C+++++++++++++%5Cend%7Barray%7D++++++%5Cright%5D++++++%3D++++++%5Cleft%5B+%5Cbegin%7Barray%7D%7Bcc%7Ccc%7D++++++1++%26++0++%26++0++%26++0++%5C%5C++++++0++%26++1++%26++0++%26++0++%5C%5C%5Chline++++++1++%26++2++%26++1++%26++0++%5C%5C++++++1++%26++1++%26++0++%26++1++%5C%5C+++++++++++++%5Cend%7Barray%7D++++++%5Cright%5D++++++%5Cleft%5B+%5Cbegin%7Barray%7D%7Brr%7Crr%7D++++++0++%26++1++%26++1++%26++1++%5C%5C+++++-1++%26++1++%26++1++%26++1++%5C%5C%5Chline++++++0++%26++0++%26++1++%26+-1++%5C%5C++++++0++%26++0++%26+-1++%26++1++%5C%5C+++++++++++++%5Cend%7Barray%7D++++++%5Cright%5D.+&bg=ffffff&fg=222222&s=0&c=20201002)
 submatrix. In the context of a linear system
submatrix. In the context of a linear system  , we have effectively solved for the variables
, we have effectively solved for the variables  and
and  and then substituted for
and then substituted for  leading principal block submatrices of
leading principal block submatrices of  involving the diagonal blocks of
involving the diagonal blocks of  an LU factorization
an LU factorization  exists. To first order, this equation is
exists. To first order, this equation is  , which gives
, which gives
 is strictly lower triangular and
is strictly lower triangular and  is upper triangular, we have, to first order,
is upper triangular, we have, to first order,
 denotes the strictly lower triangular part and
denotes the strictly lower triangular part and  the strictly upper triangular part. Clearly, the sensitivity of the LU factors depends on the inverses of
the strictly upper triangular part. Clearly, the sensitivity of the LU factors depends on the inverses of  and
and  are numerically stable in the sense that
are numerically stable in the sense that  with
with  , where
, where  is a constant and
is a constant and 
![\notag \left[\begin{array}{rrr} 3 & -1 & -2\\ -2 & 3 & -1\\ -2 & -1 & 3 \end{array}\right] \qquad (1)](https://s0.wp.com/latex.php?latex=%5Cnotag++%5Cleft%5B%5Cbegin%7Barray%7D%7Brrr%7D+++++3+%26+-1+%26+-2%5C%5C++++-2+%26++3+%26+-1%5C%5C++++-2+%26+-1+%26++3+++%5Cend%7Barray%7D%5Cright%5D+%5Cqquad+%281%29+&bg=ffffff&fg=222222&s=0&c=20201002)
![[1~1~1]^T](https://s0.wp.com/latex.php?latex=%5B1%7E1%7E1%5D%5ET&bg=ffffff&fg=222222&s=0&c=20201002) is a null vector. A useful definition of a matrix with large diagonal requires a stronger property.
is a null vector. A useful definition of a matrix with large diagonal requires a stronger property. is diagonally dominant by rows if
is diagonally dominant by rows if
 is (strictly) diagonally dominant by rows.
is (strictly) diagonally dominant by rows. let
let  and choose
and choose  . Then the
. Then the 


 and so
and so 
 square matrices. Irreducibility is equivalent to the directed graph of
square matrices. Irreducibility is equivalent to the directed graph of  for some
for some  such that
such that  . Define
. Define

 ,
,
 is nonempty, because if it were empty then we would have
is nonempty, because if it were empty then we would have  for all
for all  , then putting
, then putting  , which is a contradiction. Hence as long as
, which is a contradiction. Hence as long as  for some
for some  , we obtain
, we obtain  , which contradicts the diagonal dominance. Therefore we must have
, which contradicts the diagonal dominance. Therefore we must have  for all
for all  . This means that all the rows indexed by
. This means that all the rows indexed by  have zeros in the columns indexed by
have zeros in the columns indexed by ![\notag T_n = \left[\begin{array}{@{\mskip 5mu}c*{4}{@{\mskip 15mu} r}@{\mskip 5mu}} 2 & -1 & & & \\ -1 & 2 & -1 & & \\ & -1 & 2 & \ddots & \\ & & \ddots & \ddots & -1\\ & & & -1 & 2 \end{array}\right], \qquad (5)](https://s0.wp.com/latex.php?latex=%5Cnotag++T_n+%3D+%5Cleft%5B%5Cbegin%7Barray%7D%7B%40%7B%5Cmskip+5mu%7Dc%2A%7B4%7D%7B%40%7B%5Cmskip+15mu%7D+r%7D%40%7B%5Cmskip+5mu%7D%7D++++++2+%26+++-1++%26++++++++++%26+++++++++%26+%5C%5C+++++-1+%26++++2++%26++-1++++++%26+++++++++%26+%5C%5C++++++++%26++++-1+%26+++2++++++%26++%5Cddots+%26+%5C%5C++++++++%26+++++++%26++%5Cddots++%26++%5Cddots+%26+-1%5C%5C++++++++%26+++++++%26++++++++++%26++-1+++++%26+2++++++++++++%5Cend%7Barray%7D%5Cright%5D%2C+%5Cqquad+%285%29+&bg=ffffff&fg=222222&s=0&c=20201002)
 or
or  by
by 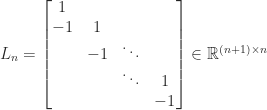
 and
and
 and
and  have the same nonzero eigenvalues, we conclude that
have the same nonzero eigenvalues, we conclude that  , where
, where  denotes the spectrum. Hence
denotes the spectrum. Hence  is symmetric positive definite and
is symmetric positive definite and  is singular and symmetric positive semidefinite.
is singular and symmetric positive semidefinite. is singular and hence cannot be strictly diagonally dominant, by Theorem 1. So
is singular and hence cannot be strictly diagonally dominant, by Theorem 1. So  cannot be true for all
cannot be true for all 
 , so
, so  , so the eigenvalues are nonnegative, and hence positive since nonzero. This provides another proof that the matrix
, so the eigenvalues are nonnegative, and hence positive since nonzero. This provides another proof that the matrix 

 is diagonally dominant by rows for some diagonal matrix
is diagonally dominant by rows for some diagonal matrix  with
with  for all
for all 
 , defined by
, defined by
 partitioning
partitioning  , the diagonal blocks
, the diagonal blocks  are all nonsingular and
are all nonsingular and
 then block diagonal dominance reduces to the usual notion of diagonal dominance. Block diagonal dominance holds for certain block tridiagonal matrices arising in the discretization of PDEs.
then block diagonal dominance reduces to the usual notion of diagonal dominance. Block diagonal dominance holds for certain block tridiagonal matrices arising in the discretization of PDEs.
 .
. . Let
. Let  satisfy
satisfy  and let
and let  . The result is obtained on applying this bound to
. The result is obtained on applying this bound to  .
.  , where
, where  ,
,  , and
, and  for
for  . It is easy to see that
. It is easy to see that  , which gives another proof that
, which gives another proof that 
 , so in view of its sign pattern
, so in view of its sign pattern  .
.
 .
. satisfies
satisfies  for all
for all  . Let
. Let  . Taking absolute values in
. Taking absolute values in  gives
gives
 , since
, since  . This inequality holds for all
. This inequality holds for all  , which gives the result.
, which gives the result. is an upper Hessenberg matrix of the form
is an upper Hessenberg matrix of the form
 can be transposed and permuted so that the coefficients
can be transposed and permuted so that the coefficients  appear in the first or last column or the last row. By expanding the determinant about the first row it can be seen that
appear in the first or last column or the last row. By expanding the determinant about the first row it can be seen that
 add
add  times the
times the  , to obtain
, to obtain  as the new last column, and expand the determinant about the last column.) MacDuffee (1946) introduced the term “companion matrix” as a translation from the German “Begleitmatrix”.
as the new last column, and expand the determinant about the last column.) MacDuffee (1946) introduced the term “companion matrix” as a translation from the German “Begleitmatrix”. in
in  , so
, so  . The inverse is
. The inverse is
 is in companion form, where
is in companion form, where  is the reverse identity matrix, and the coefficients are those of the polynomial
is the reverse identity matrix, and the coefficients are those of the polynomial  , whose roots are the reciprocals of those of
, whose roots are the reciprocals of those of 
 differs from
differs from  , where
, where  is a rank-
is a rank-![[\lambda^{n-1}, \lambda^{n-2}, \dots, \lambda, 1]^T](https://s0.wp.com/latex.php?latex=%5B%5Clambda%5E%7Bn-1%7D%2C+%5Clambda%5E%7Bn-2%7D%2C+%5Cdots%2C+%5Clambda%2C+1%5D%5ET&bg=ffffff&fg=222222&s=0&c=20201002) is a corresponding eigenvector. The last
is a corresponding eigenvector. The last ![[p_1,p_2, \dots, p_{n+1}]](https://s0.wp.com/latex.php?latex=%5Bp_1%2Cp_2%2C+%5Cdots%2C+p_%7Bn%2B1%7D%5D&bg=ffffff&fg=222222&s=0&c=20201002) of the coefficients of a polynomial,
of the coefficients of a polynomial,  , and returns the companion matrix with
, and returns the companion matrix with  , …,
, …,  .
.
 . These formulae generalize to block companion matrices, as shown by Higham and Tisseur (2003).
. These formulae generalize to block companion matrices, as shown by Higham and Tisseur (2003). ,
,  , which satisfy the recurrence
, which satisfy the recurrence  for
for  , with
, with  . We can write
. We can write
![\left[\begin{smallmatrix}1 & 1 \\ 1 & 0 \end{smallmatrix}\right]](https://s0.wp.com/latex.php?latex=%5Cleft%5B%5Cbegin%7Bsmallmatrix%7D1+%26+1+%5C%5C+1+%26+0+%5Cend%7Bsmallmatrix%7D%5Cright%5D&bg=ffffff&fg=222222&s=0&c=20201002) is a companion matrix. This expression can be used to compute
is a companion matrix. This expression can be used to compute  in
in  operations by computing the matrix power using binary powering.
operations by computing the matrix power using binary powering.


 storage instead of the
storage instead of the  storage that should be possible given the structure of
storage that should be possible given the structure of  for some
for some  with
with  . It is not necessarily the case that the computed roots are the exact roots of a polynomial with coefficients
. It is not necessarily the case that the computed roots are the exact roots of a polynomial with coefficients  with
with  for all
for all 

 denote the field
denote the field  or
or  .
. then
then  where
where  is nonsingular and
is nonsingular and  , with each
, with each  a companion matrix.
a companion matrix.
 is nonsingular, and since
is nonsingular, and since  can alternatively be taken nonsingular by considering the factorization of
can alternatively be taken nonsingular by considering the factorization of  , either one of which can be taken nonsingular, such that
, either one of which can be taken nonsingular, such that  .
. with the
with the  symmetric then
symmetric then  , so
, so  is symmetric. Likewise,
is symmetric. Likewise,  is symmetric.
is symmetric. similar to
similar to  it is
it is![\notag \widetilde{C} = \begin{bmatrix} a_4 & a_3 & 1 & 0 & 0 \\ 1 & 0 & 0 & 0 & 0 \\ 0 & a_2 & 0 & a_1 & 1 \\ 0 & 1 & 0 & 0 & 0 \\ 0 & 0 & 0 & a_0 & 0 \end{bmatrix} = \left[\begin{array}{cc|cc|c} a_4 & 1 & & & \\ 1 & 0 & & & \\\hline & & a_2 & 1 & \\ & & 1 & 0 & \\\hline & & & & a_0 \end{array}\right] \left[\begin{array}{c|cc|cc} 1 & & & & \\\hline & a_3 & 1 & & \\ & 1 & 0 & & \\\hline & & & a_1 & 1 \\ & & & 1 & 0 \end{array}\right].](https://s0.wp.com/latex.php?latex=%5Cnotag+%5Cwidetilde%7BC%7D+%3D+%5Cbegin%7Bbmatrix%7D++++a_4+%26+a_3+%26+1++%26+0+++%26+0++%5C%5C++++++1+%26+0+++%26+0++%26+0+++%26+0++%5C%5C++++++0+%26+a_2+%26+0++%26+a_1+%26+1++%5C%5C++++++0+%26+1+++%26+0++%26+0+++%26+0+%5C%5C++++++0+%26+0+++%26+0++%26+a_0+%26+0+%5Cend%7Bbmatrix%7D+%3D+%5Cleft%5B%5Cbegin%7Barray%7D%7Bcc%7Ccc%7Cc%7D++++a_4+%26+1+%26+++++%26+++%26+++%5C%5C++++++1+%26+0+%26+++++%26+++%26+++%5C%5C%5Chline++++++++%26+++%26+a_2+%26+1+%26+++%5C%5C++++++++%26+++%26++1++%26+0+%26+++%5C%5C%5Chline++++++++%26+++%26+++++%26+++%26++a_0+%5Cend%7Barray%7D%5Cright%5D+%5Cleft%5B%5Cbegin%7Barray%7D%7Bc%7Ccc%7Ccc%7D++++++1++%26+++++%26+++%26++++++%26+%5C%5C%5Chline+++++++++%26+a_3+%26+1+%26++++++%26+%5C%5C+++++++++%26++1++%26+0+%26++++++%26+%5C%5C%5Chline+++++++++%26+++++%26+++%26++a_1+%26+1+%5C%5C+++++++++%26+++++%26+++%26+++1++%26+0+%5Cend%7Barray%7D%5Cright%5D.+&bg=ffffff&fg=222222&s=0&c=20201002)
 , by taking the
, by taking the  -norm of the companion matrix
-norm of the companion matrix 
 of the form
of the form
 is the spectral radius of
is the spectral radius of  , that is, the largest modulus of any eigenvalue of
, that is, the largest modulus of any eigenvalue of  denotes that
denotes that 

 , we can set it to
, we can set it to  . Indeed let
. Indeed let  and
and  . Then
. Then  , since
, since  and
and  for
for  . Furthermore, for a nonnegative matrix the spectral radius is an eigenvalue, by the Perron–Frobenius theorem, so
. Furthermore, for a nonnegative matrix the spectral radius is an eigenvalue, by the Perron–Frobenius theorem, so  is an eigenvalue of
is an eigenvalue of  . Hence
. Hence  .
. satisfies
satisfies  ,
,

 is an
is an  .
.![\notag T_4 = \left[\begin{array}{@{\mskip 5mu}c*{3}{@{\mskip 15mu} r}@{\mskip 5mu}} 1 & -1 & -1 & -1 \\ & 1 & -1 & -1 \\ & & 1 & -1 \\ & & & 1 \end{array}\right], \quad T_4^{-1} = \begin{bmatrix} 1 & 1 & 2 & 4\\ & 1 & 1 & 2\\ & & 1 & 1\\ & & & 1 \end{bmatrix}.](https://s0.wp.com/latex.php?latex=%5Cnotag+++++T_4+%3D+%5Cleft%5B%5Cbegin%7Barray%7D%7B%40%7B%5Cmskip+5mu%7Dc%2A%7B3%7D%7B%40%7B%5Cmskip+15mu%7D+r%7D%40%7B%5Cmskip+5mu%7D%7D++++++1+%26+++-1++%26++-1++%26+-1+%5C%5C++++++++%26++++1++%26++-1++%26+-1+%5C%5C++++++++%26+++++++%26+++1++%26+-1+%5C%5C++++++++%26+++++++%26++++++%26++1++++++++++++%5Cend%7Barray%7D%5Cright%5D%2C+%5Cquad+++T_4%5E%7B-1%7D+%3D++++%5Cbegin%7Bbmatrix%7D++++1+%26+1+%26+2+%26+4%5C%5C+++%26+1+%26+1+%26+2%5C%5C+++%26+++%26+1+%26+1%5C%5C+++%26+++%26+++%26+1++++%5Cend%7Bbmatrix%7D.+&bg=ffffff&fg=222222&s=0&c=20201002)
 is the matrix
is the matrix
 is an
is an 
 denoting the vector of ones, since
denoting the vector of ones, since  is nonnegative we have
is nonnegative we have
 can be computed in
can be computed in  costs
costs  of an
of an 
 , which follows from
, which follows from  with the same
with the same  by
by![\notag A_4 = \left[\begin{array}{@{\mskip 5mu}c*{3}{@{\mskip 15mu} r}@{\mskip 5mu}} 2 & -1 & & \\ -1 & 2 & -1 & \\ & -1 & 2 & -1 \\ & & -1 & 2 \end{array}\right], \quad A_4^{-1} = \begin{bmatrix} \frac{4}{5} & \frac{3}{5} & \frac{2}{5} & \frac{1}{5}\\[\smallskipamount] \frac{3}{5} & \frac{6}{5} & \frac{4}{5} & \frac{2}{5}\\[\smallskipamount] \frac{2}{5} & \frac{4}{5} & \frac{6}{5} & \frac{3}{5}\\[\smallskipamount] \frac{1}{5} & \frac{2}{5} & \frac{3}{5} & \frac{4}{5} \end{bmatrix}.](https://s0.wp.com/latex.php?latex=%5Cnotag+++++A_4+%3D+%5Cleft%5B%5Cbegin%7Barray%7D%7B%40%7B%5Cmskip+5mu%7Dc%2A%7B3%7D%7B%40%7B%5Cmskip+15mu%7D+r%7D%40%7B%5Cmskip+5mu%7D%7D++++++2+%26+++-1++%26++++++%26++++%5C%5C+++++-1+%26++++2++%26++-1++%26++++%5C%5C++++++++%26++++-1+%26+++2++%26++-1+%5C%5C++++++++%26+++++++%26++-1++%26++2++++++++++++%5Cend%7Barray%7D%5Cright%5D%2C+%5Cquad+++A_4%5E%7B-1%7D+%3D++++%5Cbegin%7Bbmatrix%7D+++%5Cfrac%7B4%7D%7B5%7D+%26+%5Cfrac%7B3%7D%7B5%7D+%26+%5Cfrac%7B2%7D%7B5%7D+%26+%5Cfrac%7B1%7D%7B5%7D%5C%5C%5B%5Csmallskipamount%5D+++%5Cfrac%7B3%7D%7B5%7D+%26+%5Cfrac%7B6%7D%7B5%7D+%26+%5Cfrac%7B4%7D%7B5%7D+%26+%5Cfrac%7B2%7D%7B5%7D%5C%5C%5B%5Csmallskipamount%5D+++%5Cfrac%7B2%7D%7B5%7D+%26+%5Cfrac%7B4%7D%7B5%7D+%26+%5Cfrac%7B6%7D%7B5%7D+%26+%5Cfrac%7B3%7D%7B5%7D%5C%5C%5B%5Csmallskipamount%5D+++%5Cfrac%7B1%7D%7B5%7D+%26+%5Cfrac%7B2%7D%7B5%7D+%26+%5Cfrac%7B3%7D%7B5%7D+%26+%5Cfrac%7B4%7D%7B5%7D+%5Cend%7Bbmatrix%7D.+&bg=ffffff&fg=222222&s=0&c=20201002)
![\notag A = \begin{array}[b]{@{\mskip27mu}c@{\mskip-20mu}c@{\mskip-10mu}c@{}} \scriptstyle 1 & \scriptstyle n-1 & \\ \multicolumn{2}{c}{ \left[\begin{array}{c@{~}c@{~}} \alpha & b^T \\ c^T & E \\ \end{array}\right]} & \mskip-14mu\ \begin{array}{c} \scriptstyle 1 \\ \scriptstyle n-1 \end{array} \end{array}, \quad \alpha > 0, \quad b\le 0, \quad c \le 0.](https://s0.wp.com/latex.php?latex=%5Cnotag++++A+%3D++++%5Cbegin%7Barray%7D%5Bb%5D%7B%40%7B%5Cmskip27mu%7Dc%40%7B%5Cmskip-20mu%7Dc%40%7B%5Cmskip-10mu%7Dc%40%7B%7D%7D++++%5Cscriptstyle+1+%26++++%5Cscriptstyle+n-1+%26++++%5C%5C++++%5Cmulticolumn%7B2%7D%7Bc%7D%7B++++++++%5Cleft%5B%5Cbegin%7Barray%7D%7Bc%40%7B%7E%7Dc%40%7B%7E%7D%7D++++++++++++++++++%5Calpha+%26+b%5ET+%5C%5C++++++++++++++++++c%5ET++++%26+E++%5C%5C++++++++++++++%5Cend%7Barray%7D%5Cright%5D%7D++++%26+%5Cmskip-14mu%5C++++++++++%5Cbegin%7Barray%7D%7Bc%7D++++++++++++++%5Cscriptstyle+1+%5C%5C++++++++++++++%5Cscriptstyle+n-1++++++++++++++%5Cend%7Barray%7D++++%5Cend%7Barray%7D%2C+++%5Cquad+%5Calpha+%3E+0%2C+%5Cquad+b%5Cle+0%2C+%5Cquad+c+%5Cle+0.+&bg=ffffff&fg=222222&s=0&c=20201002)


 . It is easy to see that
. It is easy to see that  , and hence Theorem
, and hence Theorem  is strictly diagonally dominant by columns for some diagonal matrix
is strictly diagonally dominant by columns for some diagonal matrix  for all
for all 
 because of the sign pattern of
because of the sign pattern of  , and partial pivoting does not require row interchanges. The effect of row scaling on LU factorization is easy to see:
, and partial pivoting does not require row interchanges. The effect of row scaling on LU factorization is easy to see:
 is unit lower triangular, so that
is unit lower triangular, so that  are the LU factors of
are the LU factors of 
![\notag A^{-1} = \begin{bmatrix} \displaystyle\frac{1}{\epsilon}& 0& \displaystyle\frac{1}{\epsilon}\\[\bigskipamount] \displaystyle\frac{1}{\epsilon}& 1 & \displaystyle\frac{1 + \epsilon}{\epsilon}\\[\bigskipamount] 0& 0& 1 \end{bmatrix} \ge 0,](https://s0.wp.com/latex.php?latex=%5Cnotag++A%5E%7B-1%7D+%3D++++%5Cbegin%7Bbmatrix%7D++++++++%5Cdisplaystyle%5Cfrac%7B1%7D%7B%5Cepsilon%7D%26+0%26+%5Cdisplaystyle%5Cfrac%7B1%7D%7B%5Cepsilon%7D%5C%5C%5B%5Cbigskipamount%5D++++++++%5Cdisplaystyle%5Cfrac%7B1%7D%7B%5Cepsilon%7D%26+1+%26+%5Cdisplaystyle%5Cfrac%7B1+%2B+%5Cepsilon%7D%7B%5Cepsilon%7D%5C%5C%5B%5Cbigskipamount%5D++++++++++++++++++0%26+++++++++++0%26+++++1++++%5Cend%7Bbmatrix%7D+%5Cge+0%2C+&bg=ffffff&fg=222222&s=0&c=20201002)
 element of the LU factor
element of the LU factor  , which means that
, which means that
 is large, in that the computed LU factors have a large relative residual. We conclude that pivoting is necessary for numerical stability in LU factorization of
is large, in that the computed LU factors have a large relative residual. We conclude that pivoting is necessary for numerical stability in LU factorization of  with
with  . This iteration converges for all starting vectors
. This iteration converges for all starting vectors  if
if  . Much interest has focused on regular splittings, which are defined as ones for which
. Much interest has focused on regular splittings, which are defined as ones for which  and
and  . An
. An  ) are all convergent for
) are all convergent for  of an
of an 
 in
in  . A nonnegative vector
. A nonnegative vector  such that
such that  is called a stationary distribution vector and is of interest for describing the properties of the Markov chain. To compute
is called a stationary distribution vector and is of interest for describing the properties of the Markov chain. To compute  . Clearly,
. Clearly,  , so
, so  Decompositions of Generalized Diagonally Dominant Matrices
Decompositions of Generalized Diagonally Dominant Matrices is unitarily invariant if
is unitarily invariant if  for all unitary
for all unitary  and
and  and for all
and for all  . One can restrict the definition to real matrices, though the term unitarily invariant is still typically used.
. One can restrict the definition to real matrices, though the term unitarily invariant is still typically used. , using the fact that
, using the fact that  , we obtain
, we obtain
 ,
,

 , so
, so  depends only on the singular values. Indeed, for the 2-norm and the Frobenius norm we have
depends only on the singular values. Indeed, for the 2-norm and the Frobenius norm we have  and
and  . Here, and throughout this article,
. Here, and throughout this article,  . Another implication of the singular value dependence is that
. Another implication of the singular value dependence is that  for all
for all  such that
such that  is an absolute norm on
is an absolute norm on  and
and  for any permutation matrix
for any permutation matrix  for all
for all  implies
implies  for all
for all  for all
for all  are the singular values of
are the singular values of 
 , which is called the trace norm or nuclear norm. It can act as a proxy for the rank of a matrix. The trace norm can be expressed as
, which is called the trace norm or nuclear norm. It can act as a proxy for the rank of a matrix. The trace norm can be expressed as  , where
, where  is a polar decomposition.
is a polar decomposition.
 and
and  .
. is the
is the  (
( have SVDs with diagonal matrices
have SVDs with diagonal matrices  , where the diagonal elements are arranged in nonincreasing order. Then
, where the diagonal elements are arranged in nonincreasing order. Then  for every unitarily invariant norm.
for every unitarily invariant norm. is defined,
is defined,
 for all
for all  if and only if
if and only if  for all
for all  for all
for all  if and only if the norm is a positive scalar multiple of the Frobenius norm.
if and only if the norm is a positive scalar multiple of the Frobenius norm. , what is the nearest symmetric matrix whose eigenvalues are all at least
, what is the nearest symmetric matrix whose eigenvalues are all at least  .
. , the problem arises when the matrix is positive definite but ill conditioned and a matrix of smaller condition number is required, or when rounding errors result in small negative eigenvalues and a “safely positive definite” matrix is wanted.
, the problem arises when the matrix is positive definite but ill conditioned and a matrix of smaller condition number is required, or when rounding errors result in small negative eigenvalues and a “safely positive definite” matrix is wanted. and let
and let  . The unique matrix with smallest eigenvalue at least
. The unique matrix with smallest eigenvalue at least 
 , another way to express this result is in terms of the polar decomposition
, another way to express this result is in terms of the polar decomposition  , since
, since  .
.
 to denote that the symmetric matrix
to denote that the symmetric matrix  to denote the positive semidefinite square root.
to denote the positive semidefinite square root.


 , the nearest matrix and the distance reduce to
, the nearest matrix and the distance reduce to
 we could just perturb the negative eigenvalue to zero, as with the optimal Frobenius norm perturbation, without changing the
we could just perturb the negative eigenvalue to zero, as with the optimal Frobenius norm perturbation, without changing the  for any other nearest positive semidefinite matrix
for any other nearest positive semidefinite matrix  is an approximate minimizer of the
is an approximate minimizer of the 
 because it reduces the minimization problem to one dimension. However, the problem is nonlinear and has no closed form solution for general
because it reduces the minimization problem to one dimension. However, the problem is nonlinear and has no closed form solution for general  in the theorem:
in the theorem:  is monotone increasing on
is monotone increasing on  , and either
, and either  , in which case
, in which case  , or
, or  . The first algorithm uses the bisection method, determining the sign of
. The first algorithm uses the bisection method, determining the sign of  . A hybrid Newton–bisection method is used in Higham (1988).
. A hybrid Newton–bisection method is used in Higham (1988).
 , has two negative eigenvalues and a zero eigenvalue:
, has two negative eigenvalues and a zero eigenvalue:
 . Is this the best choice?
. Is this the best choice? is minimized over symmetric
is minimized over symmetric  for all unitary
for all unitary  since
since  is optimal is simple. For any symmetric
is optimal is simple. For any symmetric 


 for symmetric
for symmetric  . For the
. For the 
 , and
, and  for any
for any  such that
such that  .
. is the nearest Hermitian matrix to
is the nearest Hermitian matrix to  is the nearest skew-Hermitian matrix to
is the nearest skew-Hermitian matrix to 