When Cayley introduced matrix algebra in 1858, he did much more than merely arrange numbers in a rectangular array. His definitions of addition, multiplication, and inversion produced an algebraic structure that has proved to be immensely useful, and which still holds many mysteries today.
An  matrix has
matrix has  parameters, so the vector space
parameters, so the vector space  of real matrices has dimension , with a basis given by the matrices
of real matrices has dimension , with a basis given by the matrices  , where
, where  is the vector that is zero except for a
is the vector that is zero except for a  in the
in the  th entry. In his original paper, Cayley noticed the important property that the powers of a particular matrix
th entry. In his original paper, Cayley noticed the important property that the powers of a particular matrix  can never span . The Cayley–Hamilton theorem says that satisfies its own characteristic equation, that is,
can never span . The Cayley–Hamilton theorem says that satisfies its own characteristic equation, that is,  where
where  is the characteristic polynomial of . This means that
is the characteristic polynomial of . This means that  can be expressed as a linear combination of
can be expressed as a linear combination of  , , …,
, , …,  , so the powers of span a vector space of dimension at most
, so the powers of span a vector space of dimension at most  .
.
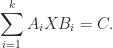
Gerstenhaber proved a generalization of this property in 1961: if and  are two commuting matrices then the matrices
are two commuting matrices then the matrices  , for all nonnegative and
, for all nonnegative and  , generate a vector space of dimension at most . This result is much more difficult to prove than the Cayley–Hamilton theorem. Gerstenhaber’s proof was based on algebraic geometry, but purely matrix-theoretic proofs have been given.
, generate a vector space of dimension at most . This result is much more difficult to prove than the Cayley–Hamilton theorem. Gerstenhaber’s proof was based on algebraic geometry, but purely matrix-theoretic proofs have been given.
A natural question, called the Gerstenhaber problem, is: does this result extend to three matrices, that is, does the vector space

have dimension at most for any matrices , , and  that commute with each other? (We can limit the powers to
that commute with each other? (We can limit the powers to  by the Cayley–Hamilton theorem.) The problem is defined over any field, but here I focus on the reals.
by the Cayley–Hamilton theorem.) The problem is defined over any field, but here I focus on the reals.
Before considering the three matrix case let us note that the answer is known to be “no” for four commuting  matrices , , , and
matrices , , , and  . Indeed let
. Indeed let

and note that all possible products of two of these matrices are zero, so the matrices commute pairwise. Yet  are clearly five linearly independent matrices. Hence Gerstenhaber’s result does not extend to four matrices. It also does not extend to five or more matrices because it is known that the failure of the result for one value of implies failure for all larger . The question, then, is whether the three matrix case is like the two matrix case or the case for four or more matrices.
are clearly five linearly independent matrices. Hence Gerstenhaber’s result does not extend to four matrices. It also does not extend to five or more matrices because it is known that the failure of the result for one value of implies failure for all larger . The question, then, is whether the three matrix case is like the two matrix case or the case for four or more matrices.
A great deal of effort has been put into proving or disproving the Gerstenhaber problem, so far without success. Here are two known facts.
- The result holds for all
 .
.
- By a 1905 result of Schur, the dimension of
 is at most
is at most  , which is less than but still much bigger than . (Here,
, which is less than but still much bigger than . (Here,  is the floor function.)
is the floor function.)
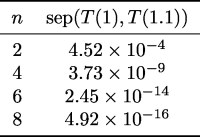
One approach to investigating this problem is to look for a counterexample computationally. For some  , choose three commuting matrices , , and , select
, choose three commuting matrices , , and , select  monomials
monomials

form the matrix
![Y = [\mathrm{vec}(X_1), \mathrm{vec}(X_2), \dots, \mathrm{vec}(X_m)],](https://s0.wp.com/latex.php?latex=Y+%3D+%5B%5Cmathrm%7Bvec%7D%28X_1%29%2C+++++++++++++%5Cmathrm%7Bvec%7D%28X_2%29%2C+%5Cdots%2C+++++++++++++%5Cmathrm%7Bvec%7D%28X_m%29%5D%2C+&bg=ffffff&fg=222222&s=0&c=20201002)
where  converts a matrix into a vector by stacking the columns on top of each other, then compute
converts a matrix into a vector by stacking the columns on top of each other, then compute  , which is a lower bound on
, which is a lower bound on  , and check whether it is greater than .
, and check whether it is greater than .
This simple-minded approach has some obvious difficulties. How do we choose , , and ? How do we choose the powers? How do we avoid overflow and underflow and compute a reliable rank, given that we might be dealing with large powers of large matrices?
Holbrook and O’Meara (2020), who have written several papers on the Gerstenhaber problem, which they call the GP problem, state that they “firmly believe the GP will turn out to have a negative answer” and they have developed a sophisticated approach to searching for a case with  , which they call a “Eureka”. They first note that , and can be assumed to be nilpotent. This means that all three matrices must be defective, because a nondefective nilpotent matrix is zero. Next they note that since commuting matrices are simultaneously unitarily triangularizable, , , and can be assumed to be strictly upper triangular. Then they note that can be assumed to be in Weyr canonical form.
, which they call a “Eureka”. They first note that , and can be assumed to be nilpotent. This means that all three matrices must be defective, because a nondefective nilpotent matrix is zero. Next they note that since commuting matrices are simultaneously unitarily triangularizable, , , and can be assumed to be strictly upper triangular. Then they note that can be assumed to be in Weyr canonical form.
The Weyr canonical form is a dual of the Jordan canonical form in which the Jordan matrix is replaced by a Weyr matrix, which is a direct sum of basic Weyr matrices. A basic Weyr matrix has one distinct eigenvalue and is upper block bidiagonal with diagonal blocks that are multiples of the identity matrix and superdiagonal blocks that are rectangular identity matrices. The difference between Jordan and Weyr matrices is illustrated by the example
![J(\lambda) = \left[\begin{array}{ccc|cc} \lambda & 1 & 0 &&\\ 0 & \lambda & 1 &&\\ 0 & 0 & \lambda &&\\\hline & & &\lambda & 1\\ & & & 0 &\lambda \end{array}\right], \quad W(\lambda) = \left[\begin{array}{cc|cc|c} \lambda & 0 & 1 & 0&\\ 0 & \lambda & 0 & 1&\\\hline & & \lambda & 0 &1\\ & & 0 &\lambda & 0\\\hline & & & 0 &\lambda \end{array}\right],](https://s0.wp.com/latex.php?latex=J%28%5Clambda%29+%3D+++++%5Cleft%5B%5Cbegin%7Barray%7D%7Bccc%7Ccc%7D+++++%5Clambda+%26++1++++++%26+0+%26%26%5C%5C+++++0+++++++%26+%5Clambda+%26+1+%26%26%5C%5C+++++0+++++++%26+0+++++++%26+%5Clambda+%26%26%5C%5C%5Chline+++++++++++++%26+++++++++%26+++%26%5Clambda+%26+1%5C%5C+++++++++++++%26+++++++++%26+++%26+0+%26%5Clambda++++++%5Cend%7Barray%7D%5Cright%5D%2C+%5Cquad+++++W%28%5Clambda%29+%3D+++++%5Cleft%5B%5Cbegin%7Barray%7D%7Bcc%7Ccc%7Cc%7D+++++%5Clambda+%26++0++++++%26+1+%26+0%26%5C%5C+++++0+++++++%26+%5Clambda+%26+0+%26+1%26%5C%5C%5Chline+++++++++++++%26+++++++++%26+%5Clambda+%26+0+%261%5C%5C+++++++++++++%26+++++++++%26+0++%26%5Clambda+%26+0%5C%5C%5Chline+++++++++++++%26+++++++++%26+++%26+0+%26%5Clambda++++++%5Cend%7Barray%7D%5Cright%5D%2C+&bg=ffffff&fg=222222&s=0&c=20201002)
where the Jordan matrix  and Weyr matrix
and Weyr matrix  are related by
are related by  for some permutation matrix
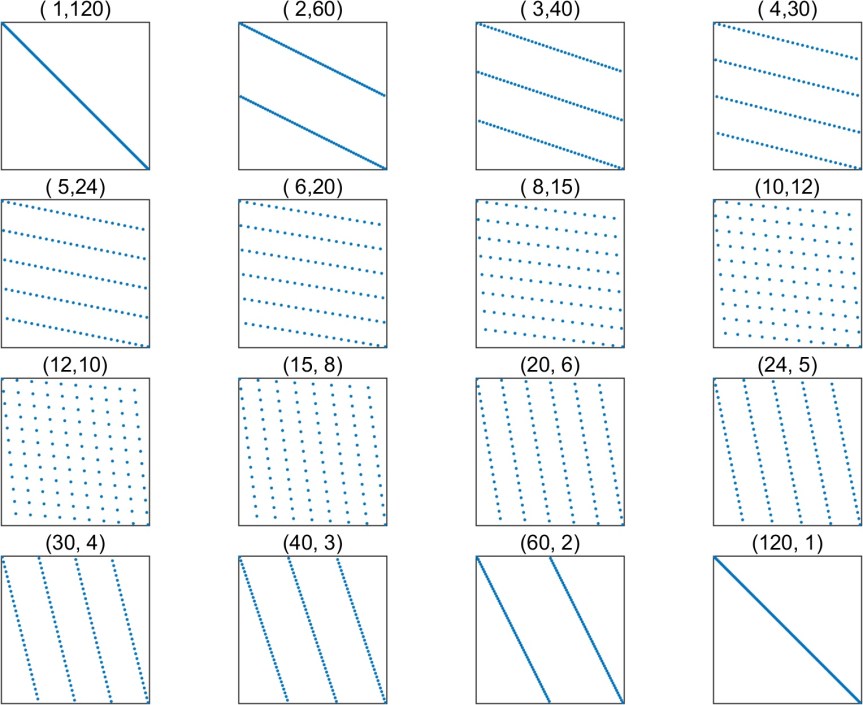
for some permutation matrix  . There is an elegant way of relating the block sizes in the Jordan and Weyr matrices via a Young diagram. Form an array whose
. There is an elegant way of relating the block sizes in the Jordan and Weyr matrices via a Young diagram. Form an array whose  th column contains
th column contains  dots, where is the size of the th diagonal block of
dots, where is the size of the th diagonal block of  :
:

Then the number of dots in the th row is the size of the th diagonal block in the Weyr form.
The reason for using the Weyr form is that whereas any matrix that commutes with a Jordan matrix has Toeplitz blocks, any matrix that commutes with a Weyr matrix is block upper triangular and is uniquely determined by the first block row. By choosing a Weyr form for , commuting matrices and can be built up in a systematic way.
Thanks to a result of O’Meara (2020) it suffices to compute modulo a prime  , so the computations can be done in exact arithmetic, removing the need to worry about rounding errors or overflow.
, so the computations can be done in exact arithmetic, removing the need to worry about rounding errors or overflow.
Holbrook and O’Meara have mostly tried matrices up to dimension 50, but they feel that “the Loch Ness monster probably lives in deeper water, closer to  ”. Their MATLAB codes (40 nicely commented but not optimized M-files) are available on request from the address given in their preprint. If you have the time to spare you might want to experiment with the codes and try to find a Eureka.
”. Their MATLAB codes (40 nicely commented but not optimized M-files) are available on request from the address given in their preprint. If you have the time to spare you might want to experiment with the codes and try to find a Eureka.
References
This is a minimal set of references, which contain further useful references within.
- Robert M. Corless and Steven E. Thornton, The Weyr Canonical Form, 2016 (PDF poster).
- John Holbrook and Kevin O’Meara, A Computing Strategy and Programs to Resolve the Gerstenhaber Problem for Commuting Triples of Matrices, ArXiv:2006.085882020, 2020.
- John Holbrook and Kevin O’Meara, Commuting Triples of Matrices Vs the Computer, IMAGE (The Bulletin of the International Linear Algebra Society), to appear.
- Kevin O’Meara, The Gerstenhaber Problem for Commuting Triples of Matrices is “Decidable”, Comm. Algebra 48, 453–466, 2020.
- Kevin O’Meara, John Clark, and Charles Vinsonhaler, Advanced Topics in Linear Algebra. Weaving Matrix Problems Through the Weyr Form, Oxford University Press, Oxford, UK. 2011. Chapter 5.
- B. A. Sethuraman, the Algebra Generated by Three Commuting Matrices, Math. Newsl. 21, 62–67, 2011.
This article is part of the “What Is” series, available from https://nhigham.com/category/what-is and in PDF form from the GitHub repository https://github.com/higham/what-is.

























































































 and
and  (also called the tensor product) is the
(also called the tensor product) is the  matrix
matrix
 is the block
is the block  matrix with
matrix with  block
block  . For example,
. For example,![\begin{bmatrix} a_{11} & a_{12} \\ a_{21} & a_{22} \end{bmatrix} \otimes \begin{bmatrix} b_{11} & b_{12} & b_{13} \\ b_{21} & b_{22} & b_{23} \end{bmatrix} = \left[\begin{array}{ccc|ccc} a_{11}b_{11} & a_{11}b_{12} & a_{11}b_{13} & a_{12}b_{11} & a_{12}b_{12} & a_{12}b_{13} \\ a_{11}b_{21} & a_{11}b_{22} & a_{11}b_{23} & a_{12}b_{21} & a_{12}b_{22} & a_{12}b_{23} \\\hline a_{21}b_{11} & a_{21}b_{12} & a_{21}b_{13} & a_{22}b_{11} & a_{22}b_{12} & a_{22}b_{13} \\ a_{21}b_{21} & a_{21}b_{22} & a_{21}b_{23} & a_{22}b_{21} & a_{22}b_{22} & a_{22}b_{23} \end{array}\right].](https://s0.wp.com/latex.php?latex=%5Cbegin%7Bbmatrix%7D+a_%7B11%7D+%26+a_%7B12%7D+%5C%5C+a_%7B21%7D+%26+a_%7B22%7D+%5Cend%7Bbmatrix%7D+%5Cotimes+%5Cbegin%7Bbmatrix%7D+b_%7B11%7D+%26+b_%7B12%7D+%26+b_%7B13%7D+%5C%5C+b_%7B21%7D+%26+b_%7B22%7D+%26+b_%7B23%7D+%5Cend%7Bbmatrix%7D+%3D+%5Cleft%5B%5Cbegin%7Barray%7D%7Bccc%7Cccc%7D+a_%7B11%7Db_%7B11%7D+%26+a_%7B11%7Db_%7B12%7D+%26+a_%7B11%7Db_%7B13%7D+%26+a_%7B12%7Db_%7B11%7D+%26+a_%7B12%7Db_%7B12%7D+%26+a_%7B12%7Db_%7B13%7D+%5C%5C+a_%7B11%7Db_%7B21%7D+%26+a_%7B11%7Db_%7B22%7D+%26+a_%7B11%7Db_%7B23%7D+%26+a_%7B12%7Db_%7B21%7D+%26+a_%7B12%7Db_%7B22%7D+%26+a_%7B12%7Db_%7B23%7D+%5C%5C%5Chline+a_%7B21%7Db_%7B11%7D+%26+a_%7B21%7Db_%7B12%7D+%26+a_%7B21%7Db_%7B13%7D+%26+a_%7B22%7Db_%7B11%7D+%26+a_%7B22%7Db_%7B12%7D+%26+a_%7B22%7Db_%7B13%7D+%5C%5C+a_%7B21%7Db_%7B21%7D+%26+a_%7B21%7Db_%7B22%7D+%26+a_%7B21%7Db_%7B23%7D+%26+a_%7B22%7Db_%7B21%7D+%26+a_%7B22%7Db_%7B22%7D+%26+a_%7B22%7Db_%7B23%7D+%5Cend%7Barray%7D%5Cright%5D.+&bg=ffffff&fg=222222&s=0&c=20201002)
 , which is not the case for the usual matrix product
, which is not the case for the usual matrix product  when it is defined. Indeed if
when it is defined. Indeed if  of the products
of the products  and contains all
and contains all  products
products 
 is an eigenvector of
is an eigenvector of  and
and  is an eigenvector of
is an eigenvector of  then
then
 is an eigenvalue of
is an eigenvalue of  . In fact, the
. In fact, the  eigenvalues of
eigenvalues of  and
and  .
. s whose rows and columns are mutually orthogonal. If
s whose rows and columns are mutually orthogonal. If  is an
is an 
 Hadamard matrix.
Hadamard matrix. , which can be shown to be Hermitian positive definite from the properties mentioned above. If
, which can be shown to be Hermitian positive definite from the properties mentioned above. If  and
and  are Cholesky factorizations then
are Cholesky factorizations then
 , which is easily seen to be triangular with positive diagonal elements, is the Cholesky factor of
, which is easily seen to be triangular with positive diagonal elements, is the Cholesky factor of  flops, whereas
flops, whereas  this can be done using
this can be done using ![A = [a_1,a_2,\dots,a_m]](https://s0.wp.com/latex.php?latex=A+%3D+%5Ba_1%2Ca_2%2C%5Cdots%2Ca_m%5D&bg=ffffff&fg=222222&s=0&c=20201002) then
then ![\mathrm{vec}(A) = [a_1^T a_2^T \dots a_m^T]^T](https://s0.wp.com/latex.php?latex=%5Cmathrm%7Bvec%7D%28A%29+%3D+%5Ba_1%5ET+a_2%5ET+%5Cdots+a_m%5ET%5D%5ET&bg=ffffff&fg=222222&s=0&c=20201002) . The vec operator and the Kronecker product interact nicely: for any
. The vec operator and the Kronecker product interact nicely: for any  is defined,
is defined,
 in the usual form “
in the usual form “ ”.
”. . The eigenvalues of
. The eigenvalues of  are
are  ,
,  ,
,  , where the
, where the  are the eigenvalues of
are the eigenvalues of  are those of
are those of  :
:
 and
and  contain the same
contain the same 
 . This matrix is called the the vec-permutation matrix, and is also known as the commutation matrix.
. This matrix is called the the vec-permutation matrix, and is also known as the commutation matrix. in general, but
in general, but  and
and  do contain the same elements in different orders. In fact, the two matrices are related by row and column permutations: if
do contain the same elements in different orders. In fact, the two matrices are related by row and column permutations: if 
 ,
,
 , from which the relation follows on using
, from which the relation follows on using  , which can be obtained by replacing
, which can be obtained by replacing  in the definition of vec.
in the definition of vec.
 , where the title of each subplot is
, where the title of each subplot is  .
.
 for
for  as
as  , where
, where  (
(![G_4 = \left[\begin{array}{cccc} 1 & 1 & 1 & 1\\ 1 & 2 & 1 & 2\\ 1 & 1 & 3 & 1\\ 1 & 2 & 1 & 4 \end{array}\right] = \left[\begin{array}{cccc} 1 & 0 & 0 & 0\\ 1 & 1 & 0 & 0\\ 1 & 0 & \sqrt{2} & 0\\ 1 & 1 & 0 & \sqrt{2} \end{array}\right] \left[\begin{array}{cccc} 1 & 1 & 1 & 1\\ 0 & 1 & 0 & 1\\ 0 & 0 & \sqrt{2} & 0\\ 0 & 0 & 0 & \sqrt{2} \end{array}\right].](https://s0.wp.com/latex.php?latex=G_4+%3D+%5Cleft%5B%5Cbegin%7Barray%7D%7Bcccc%7D+1+%26+1+%26+1+%26+1%5C%5C+1+%26+2+%26+1+%26+2%5C%5C+1+%26+1+%26+3+%26+1%5C%5C+1+%26+2+%26+1+%26+4+%5Cend%7Barray%7D%5Cright%5D+%3D+%5Cleft%5B%5Cbegin%7Barray%7D%7Bcccc%7D+1+%26+0+%26+0+%26+0%5C%5C+1+%26+1+%26+0+%26+0%5C%5C+1+%26+0+%26+%5Csqrt%7B2%7D+%26+0%5C%5C+1+%26+1+%26+0+%26+%5Csqrt%7B2%7D+%5Cend%7Barray%7D%5Cright%5D+%5Cleft%5B%5Cbegin%7Barray%7D%7Bcccc%7D+1+%26+1+%26+1+%26+1%5C%5C+0+%26+1+%26+0+%26+1%5C%5C+0+%26+0+%26+%5Csqrt%7B2%7D+%26+0%5C%5C+0+%26+0+%26+0+%26+%5Csqrt%7B2%7D+%5Cend%7Barray%7D%5Cright%5D.+&bg=ffffff&fg=222222&s=0&c=20201002)
 ,
,  , where
, where  is the leading principal submatrix of order
is the leading principal submatrix of order  with
with  ,
, ![\bigl[\begin{smallmatrix}1 & 1\\ 1& 2\end{smallmatrix}\bigr]= \bigl[\begin{smallmatrix}1 & 0\\ 1& 1\end{smallmatrix}\bigr] \bigl[\begin{smallmatrix}1 & 1\\ 0& 1\end{smallmatrix}\bigr]](https://s0.wp.com/latex.php?latex=%5Cbigl%5B%5Cbegin%7Bsmallmatrix%7D1+%26+1%5C%5C+1%26+2%5Cend%7Bsmallmatrix%7D%5Cbigr%5D%3D++%5Cbigl%5B%5Cbegin%7Bsmallmatrix%7D1+%26+0%5C%5C+1%26+1%5Cend%7Bsmallmatrix%7D%5Cbigr%5D++%5Cbigl%5B%5Cbegin%7Bsmallmatrix%7D1+%26+1%5C%5C+0%26+1%5Cend%7Bsmallmatrix%7D%5Cbigr%5D&bg=ffffff&fg=222222&s=0&c=20201002) .
. , which implies the interesting relation that the
, which implies the interesting relation that the  element of
element of  is
is  . So
. So  has
has  element
element  . We also have
. We also have  , so
, so  for this matrix.
for this matrix. as
as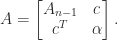
 is positive definite (any principal submatrix of a positive definite matrix is easily shown to be positive definite). Assume that
is positive definite (any principal submatrix of a positive definite matrix is easily shown to be positive definite). Assume that  and define the upper triangular matrix
and define the upper triangular matrix


 is nonsingular. Then the second equation gives
is nonsingular. Then the second equation gives  . It remains to check that there is a unique real, positive
. It remains to check that there is a unique real, positive  satisfying this equation. From the inequality
satisfying this equation. From the inequality
 , hence there is a unique
, hence there is a unique  . This completes the inductive step.
. This completes the inductive step. is the Schur complement of
is the Schur complement of 
 .
. , then the following algorithm is obtained:
, then the following algorithm is obtained:
 and on the next iteration of the loop we will have a division by zero. In floating-point arithmetic it is possible for the algorithm to fail for a positive definite matrix, but only if it is numerically singular: the algorithm is guaranteed to run to completion if the condition number
and on the next iteration of the loop we will have a division by zero. In floating-point arithmetic it is possible for the algorithm to fail for a positive definite matrix, but only if it is numerically singular: the algorithm is guaranteed to run to completion if the condition number  is safely less than
is safely less than  , where
, where  is the unit roundoff.
is the unit roundoff. such that
such that  . Here is an example. The code
. Here is an example. The code satisfies
satisfies
 is a constant. Unlike for LU factorization there is no possibility of element growth; indeed for
is a constant. Unlike for LU factorization there is no possibility of element growth; indeed for  ,
,
 and then the upper triangular system
and then the upper triangular system  . The computed solution
. The computed solution  can be shown to satisfy
can be shown to satisfy
 is another constant. Thus
is another constant. Thus  for all
for all  , so that
, so that ![A = \left[\begin{array}{cccc} 1 & 1 & 1 & 1\\ 1 & 1 & 1 & 1\\ 1 & 1 & 2 & 2\\ 1 & 1 & 2 & 4\\ \end{array}\right] = \left[\begin{array}{cccc} 1 & 0 & 0 & 0\\ 1 & 0 & 0 & 0\\ 1 & 1 & 0 & 0\\ 1 & 1 & x & y\\ \end{array}\right] \left[\begin{array}{cccc} 1 & 1 & 1 & 1\\ 0 & 0 & 1 & 1\\ 0 & 0 & 0 & x\\ 0 & 0 & 0 & y\\ \end{array}\right] = R^T\!R](https://s0.wp.com/latex.php?latex=A+%3D+%5Cleft%5B%5Cbegin%7Barray%7D%7Bcccc%7D++1+%26+1+%26+1+%26+1%5C%5C++1+%26+1+%26+1+%26+1%5C%5C++1+%26+1+%26+2+%26+2%5C%5C++1+%26+1+%26+2+%26+4%5C%5C+%5Cend%7Barray%7D%5Cright%5D+%3D+%5Cleft%5B%5Cbegin%7Barray%7D%7Bcccc%7D+1+%26+0+%26+0+%26+0%5C%5C+1+%26+0+%26+0+%26+0%5C%5C+1+%26+1+%26+0+%26+0%5C%5C+1+%26+1+%26+x+%26+y%5C%5C+%5Cend%7Barray%7D%5Cright%5D+%5Cleft%5B%5Cbegin%7Barray%7D%7Bcccc%7D+1+%26+1+%26+1+%26+1%5C%5C+0+%26+0+%26+1+%26+1%5C%5C+0+%26+0+%26+0+%26+x%5C%5C+0+%26+0+%26+0+%26+y%5C%5C+%5Cend%7Barray%7D%5Cright%5D++%3D+R%5ET%5C%21R+&bg=ffffff&fg=222222&s=0&c=20201002)
 such that
such that  . Note that
. Note that  what is usually wanted is a Cholesky factorization in which
what is usually wanted is a Cholesky factorization in which  rows. Such a factorization can be obtained by using complete pivoting, which at each stage permutes the largest remaining diagonal element into the pivot position, which gives a factorization
rows. Such a factorization can be obtained by using complete pivoting, which at each stage permutes the largest remaining diagonal element into the pivot position, which gives a factorization
 is a permutation matrix. For example, with
is a permutation matrix. For example, with ![\Pi^T\mskip-5mu A\Pi = \left[\begin{array}{cccc} 4 & 2 & 1 & 1\\ 2 & 2 & 1 & 1\\ 1 & 1 & 1 & 1\\ 1 & 1 & 1 & 1 \end{array}\right] = \left[\begin{array}{cccc} 2 & 0 & 0 & 0\\ 1 & 1 & 0 & 0\\ \frac{1}{2} & \frac{1}{2} & \frac{\sqrt{2}}{2} & 0\\[2pt] \frac{1}{2} & \frac{1}{2} & \frac{\sqrt{2}}{2} & 0 \end{array}\right] \left[\begin{array}{cccc} 2 & 1 & \frac{1}{2} & \frac{1}{2}\\[2pt] 0 & 1 & \frac{1}{2} & \frac{1}{2}\\[2pt] 0 & 0 & \frac{\sqrt{2}}{2} & \frac{\sqrt{2}}{2}\\ 0 & 0 & 0 & 0 \end{array}\right],](https://s0.wp.com/latex.php?latex=%5CPi%5ET%5Cmskip-5mu+A%5CPi++%3D+%5Cleft%5B%5Cbegin%7Barray%7D%7Bcccc%7D+4+%26+2+%26+1+%26+1%5C%5C+2+%26+2+%26+1+%26+1%5C%5C+1+%26+1+%26+1+%26+1%5C%5C+1+%26+1+%26+1+%26+1+%5Cend%7Barray%7D%5Cright%5D++++%3D+%5Cleft%5B%5Cbegin%7Barray%7D%7Bcccc%7D+2+%26+0+%26+0+%26+0%5C%5C+1+%26+1+%26+0+%26+0%5C%5C+%5Cfrac%7B1%7D%7B2%7D+%26+%5Cfrac%7B1%7D%7B2%7D+%26+%5Cfrac%7B%5Csqrt%7B2%7D%7D%7B2%7D+%26+0%5C%5C%5B2pt%5D+%5Cfrac%7B1%7D%7B2%7D+%26+%5Cfrac%7B1%7D%7B2%7D+%26+%5Cfrac%7B%5Csqrt%7B2%7D%7D%7B2%7D+%26+0+%5Cend%7Barray%7D%5Cright%5D+%5Cleft%5B%5Cbegin%7Barray%7D%7Bcccc%7D+2+%26+1+%26+%5Cfrac%7B1%7D%7B2%7D+%26+%5Cfrac%7B1%7D%7B2%7D%5C%5C%5B2pt%5D+0+%26+1+%26+%5Cfrac%7B1%7D%7B2%7D+%26+%5Cfrac%7B1%7D%7B2%7D%5C%5C%5B2pt%5D+0+%26+0+%26+%5Cfrac%7B%5Csqrt%7B2%7D%7D%7B2%7D+%26+%5Cfrac%7B%5Csqrt%7B2%7D%7D%7B2%7D%5C%5C+0+%26+0+%26+0+%26+0+%5Cend%7Barray%7D%5Cright%5D%2C+&bg=ffffff&fg=222222&s=0&c=20201002)
 of a scalar
of a scalar  to
to  . The backward error of
. The backward error of 
 for a modest constant
for a modest constant  , where
, where  , where
, where
 implies that a backward stable algorithm is automatically forward stable. The converse is not true. An example of an algorithm that is forward stable but not backward stable is Gauss–Jordan elimination for solving a linear system.
implies that a backward stable algorithm is automatically forward stable. The converse is not true. An example of an algorithm that is forward stable but not backward stable is Gauss–Jordan elimination for solving a linear system.
 small in the sense described above, then the algorithm for computing
small in the sense described above, then the algorithm for computing 
 , where
, where  to satisfy
to satisfy  for some small
for some small  and
and  , meaning that
, meaning that  , or both. For a nonlinear function we need to consider whether problem parameters are data; for example, for
, or both. For a nonlinear function we need to consider whether problem parameters are data; for example, for  are the
are the  and the
and the  constants or are they data, like
constants or are they data, like  with
with  is a factorization
is a factorization  , where
, where  has orthonormal columns and
has orthonormal columns and  is Hermitian positive semidefinite. This decomposition is a generalization of the polar representation
is Hermitian positive semidefinite. This decomposition is a generalization of the polar representation  of a complex number, where
of a complex number, where  corresponds to
corresponds to  and
and  . When
. When  ,
,  , so
, so  , which is the unique positive semidefinite square root of
, which is the unique positive semidefinite square root of  . When
. When  is unique, and in this case
is unique, and in this case 
![A = \left[\begin{array}{@{}rr} 4 & 0\\ -5 & -3\\ 2 & 6 \end{array}\right] = \sqrt{2}\left[\begin{array}{@{}rr} \frac{1}{2} & -\frac{1}{6}\\[\smallskipamount] -\frac{1}{2} & -\frac{1}{6}\\[\smallskipamount] 0 & \frac{2}{3} \end{array}\right] \cdot \sqrt{2}\left[\begin{array}{@{\,}rr@{}} \frac{9}{2} & \frac{3}{2}\\[\smallskipamount] \frac{3}{2} & \frac{9}{2} \end{array}\right] \equiv UH.](https://s0.wp.com/latex.php?latex=A+%3D+%5Cleft%5B%5Cbegin%7Barray%7D%7B%40%7B%7Drr%7D+4+%26+0%5C%5C+-5+%26+-3%5C%5C+2+%26+6+%5Cend%7Barray%7D%5Cright%5D+++%3D+++%5Csqrt%7B2%7D%5Cleft%5B%5Cbegin%7Barray%7D%7B%40%7B%7Drr%7D+%5Cfrac%7B1%7D%7B2%7D+%26+-%5Cfrac%7B1%7D%7B6%7D%5C%5C%5B%5Csmallskipamount%5D+-%5Cfrac%7B1%7D%7B2%7D+%26+-%5Cfrac%7B1%7D%7B6%7D%5C%5C%5B%5Csmallskipamount%5D+0+%26+%5Cfrac%7B2%7D%7B3%7D+%5Cend%7Barray%7D%5Cright%5D+++%5Ccdot+++%5Csqrt%7B2%7D%5Cleft%5B%5Cbegin%7Barray%7D%7B%40%7B%5C%2C%7Drr%40%7B%7D%7D+%5Cfrac%7B9%7D%7B2%7D+%26+%5Cfrac%7B3%7D%7B2%7D%5C%5C%5B%5Csmallskipamount%5D+%5Cfrac%7B3%7D%7B2%7D+%26+%5Cfrac%7B9%7D%7B2%7D+%5Cend%7Barray%7D%5Cright%5D+++%5Cequiv+UH.+&bg=ffffff&fg=222222&s=0&c=20201002)
 and so
and so  . The equation
. The equation 

 and the norm is the Frobenius norm
and the norm is the Frobenius norm  . This problem, which arises in factor analysis and in multidimensional scaling, asks how closely a unitary transformation of
. This problem, which arises in factor analysis and in multidimensional scaling, asks how closely a unitary transformation of  , and there is a unique solution if
, and there is a unique solution if  and the polar decomposition can be computed by exploiting a relationship with quaternions.
and the polar decomposition can be computed by exploiting a relationship with quaternions.
 converge quadratically to
converge quadratically to  is a singular value decomposition (SVD), where
is a singular value decomposition (SVD), where  has orthonormal columns,
has orthonormal columns,  is unitary, and
is unitary, and  is square and diagonal with nonnegative diagonal elements, then
is square and diagonal with nonnegative diagonal elements, then
 is a spectral decomposition (
is a spectral decomposition ( unitary,
unitary,  is an SVD. This latter relation is the basis of a method for computing the SVD that first computes the polar decomposition by a matrix iteration then computes the eigensystem of
is an SVD. This latter relation is the basis of a method for computing the SVD that first computes the polar decomposition by a matrix iteration then computes the eigensystem of  , are overcome in the canonical polar decomposition, defined for any
, are overcome in the canonical polar decomposition, defined for any  . The superscript “
. The superscript “ ” denotes the Moore–Penrose pseudoinverse and a partial isometry can be characterized as a matrix
” denotes the Moore–Penrose pseudoinverse and a partial isometry can be characterized as a matrix  .
. matrix
matrix

 for
for ![x = [1,{}-\!\sqrt{2},~1]^T](https://s0.wp.com/latex.php?latex=x+%3D+%5B1%2C%7B%7D-%5C%21%5Csqrt%7B2%7D%2C%7E1%5D%5ET&bg=ffffff&fg=222222&s=0&c=20201002) .
. for all
for all  . Sometimes this condition can be confirmed from the definition of
. Sometimes this condition can be confirmed from the definition of  and
and  for
for  . Generally, though, this condition is not easy to check.
. Generally, though, this condition is not easy to check. , where the submatrix
, where the submatrix  comprises the intersection of rows and columns
comprises the intersection of rows and columns  , which also follows from the second condition since the determinant is the product of the eigenvalues.
, which also follows from the second condition since the determinant is the product of the eigenvalues. .
.![H_4 = \left[\begin{array}{@{\mskip 5mu}c*{3}{@{\mskip 15mu} c}@{\mskip 5mu}} 1 & \frac{1}{2} & \frac{1}{3} & \frac{1}{4} \\[6pt] \frac{1}{2} & \frac{1}{3} & \frac{1}{4} & \frac{1}{5}\\[6pt] \frac{1}{3} & \frac{1}{4} & \frac{1}{5} & \frac{1}{6}\\[6pt] \frac{1}{4} & \frac{1}{5} & \frac{1}{6} & \frac{1}{7}\\[6pt] \end{array}\right],](https://s0.wp.com/latex.php?latex=H_4+%3D+%5Cleft%5B%5Cbegin%7Barray%7D%7B%40%7B%5Cmskip+5mu%7Dc%2A%7B3%7D%7B%40%7B%5Cmskip+15mu%7D+c%7D%40%7B%5Cmskip+5mu%7D%7D+++++++++++++1+%26+%5Cfrac%7B1%7D%7B2%7D+%26+%5Cfrac%7B1%7D%7B3%7D++%26+%5Cfrac%7B1%7D%7B4%7D++%5C%5C%5B6pt%5D++++++++++++%5Cfrac%7B1%7D%7B2%7D+%26+%5Cfrac%7B1%7D%7B3%7D+++%26+%5Cfrac%7B1%7D%7B4%7D+++%26+%5Cfrac%7B1%7D%7B5%7D%5C%5C%5B6pt%5D++++++++++++%5Cfrac%7B1%7D%7B3%7D+%26+%5Cfrac%7B1%7D%7B4%7D+++%26++++++%5Cfrac%7B1%7D%7B5%7D+++%26+%5Cfrac%7B1%7D%7B6%7D%5C%5C%5B6pt%5D++++++++++++%5Cfrac%7B1%7D%7B4%7D+%26+%5Cfrac%7B1%7D%7B5%7D+++%26++++++%5Cfrac%7B1%7D%7B6%7D+++%26+%5Cfrac%7B1%7D%7B7%7D%5C%5C%5B6pt%5D++++++++++++%5Cend%7Barray%7D%5Cright%5D%2C+&bg=ffffff&fg=222222&s=0&c=20201002)
![P_4 = \left[\begin{array}{@{\mskip 5mu}c*{3}{@{\mskip 15mu} r}@{\mskip 5mu}} 1 & 1 & 1 & 1\\ 1 & 2 & 3 & 4\\ 1 & 3 & 6 & 10\\ 1 & 4 & 10 & 20 \end{array}\right],](https://s0.wp.com/latex.php?latex=P_4+%3D+%5Cleft%5B%5Cbegin%7Barray%7D%7B%40%7B%5Cmskip+5mu%7Dc%2A%7B3%7D%7B%40%7B%5Cmskip+15mu%7D+r%7D%40%7B%5Cmskip+5mu%7D%7D++++++1+%26++++1++%26+++1++%26+++1%5C%5C++++++1+%26++++2++%26+++3++%26+++4%5C%5C++++++1+%26++++3++%26+++6++%26++10%5C%5C++++++1+%26++++4++%26++10++%26++20++++++++++++%5Cend%7Barray%7D%5Cright%5D%2C+&bg=ffffff&fg=222222&s=0&c=20201002)
![S_4 = \left[\begin{array}{@{\mskip 5mu}c*{3}{@{\mskip 15mu} r}@{\mskip 5mu}} 2 & -1 & & \\ -1 & 2 & -1 & \\ & -1 & 2 & -1 \\ & & -1 & 2 \end{array}\right].](https://s0.wp.com/latex.php?latex=S_4+%3D+%5Cleft%5B%5Cbegin%7Barray%7D%7B%40%7B%5Cmskip+5mu%7Dc%2A%7B3%7D%7B%40%7B%5Cmskip+15mu%7D+r%7D%40%7B%5Cmskip+5mu%7D%7D++++++2+%26+++-1++%26++++++%26++++%5C%5C+++++-1+%26++++2++%26++-1++%26++++%5C%5C++++++++%26++++-1+%26+++2++%26++-1+%5C%5C++++++++%26+++++++%26++-1++%26++2++++++++++++%5Cend%7Barray%7D%5Cright%5D.+&bg=ffffff&fg=222222&s=0&c=20201002)
 is non-decreasing along the diagonals. However, if
is non-decreasing along the diagonals. However, if  for any permutation matrix
for any permutation matrix 


 are positive definite. The matrix
are positive definite. The matrix  (Fischer’s inequality). Applying this inequality recursively gives Hadamard’s inequality for a symmetric positive definite
(Fischer’s inequality). Applying this inequality recursively gives Hadamard’s inequality for a symmetric positive definite 
 for all
for all  , so that the quadratic form is allowed to be zero, then the symmetric matrix
, so that the quadratic form is allowed to be zero, then the symmetric matrix  , being nonnegative; it is not enough to check the
, being nonnegative; it is not enough to check the 
 , and
, and  ) and
) and  for all nonzero vectors
for all nonzero vectors  matrix to upper triangular form by elementary row operations. It consists of
matrix to upper triangular form by elementary row operations. It consists of  , where
, where  is unit lower triangular (lower triangular with ones on the diagonal) and
is unit lower triangular (lower triangular with ones on the diagonal) and 
 are the elements at the start of the
are the elements at the start of the  . Specifically, he obtained a bound for the backward error of the computed solution that is proportional to
. Specifically, he obtained a bound for the backward error of the computed solution that is proportional to  , where
, where  can be arbitrarily large, as is easily seen for
can be arbitrarily large, as is easily seen for  . For some specific types of matrix more can be said.
. For some specific types of matrix more can be said. . In this case one would normally use Cholesky factorization instead of LU factorization.
. In this case one would normally use Cholesky factorization instead of LU factorization. .
. .
. position at the start of stage
position at the start of stage  and that equality is attained for matrices of the form illustrated for
and that equality is attained for matrices of the form illustrated for  by
by![\left[\begin{array}{@{\mskip3mu}rrrr} 1 & 0 & 0 & 1 \\ -1 & 1 & 0 & 1 \\ -1 & -1 & 1 & 1 \\ -1 & -1 & -1 & 1 \\ \end{array} \right].](https://s0.wp.com/latex.php?latex=%5Cleft%5B%5Cbegin%7Barray%7D%7B%40%7B%5Cmskip3mu%7Drrrr%7D+++++++++++++++++++++++1++%26+0++%26+0++%26+1++%5C%5C+++++++++++++++++++++++-1+%26+1++%26+0++%26+1++%5C%5C+++++++++++++++++++++++-1+%26+-1+%26+1++%26+1++%5C%5C+++++++++++++++++++++++-1+%26+-1+%26+-1+%26+1++%5C%5C++++++++%5Cend%7Barray%7D++++++++%5Cright%5D.+&bg=ffffff&fg=222222&s=0&c=20201002)


 . Much interest has focused on the question of whether growth of
. Much interest has focused on the question of whether growth of  , but such matrices do not exist for all
, but such matrices do not exist for all  and
and  .
. matrix with growth
matrix with growth  .
.
 is
is  , so it must be mapped back into
, so it must be mapped back into  be the given number and let
be the given number and let  and
and  with
with  be the adjacent numbers in
be the adjacent numbers in 
 and down to
and down to  ; note that these probabilities sum to
; note that these probabilities sum to 
 . In addition, certain results that hold for round to nearest, such as
. In addition, certain results that hold for round to nearest, such as  and
and  , can fail for stochastic rounding. What, then, is the benefit of stochastic rounding?
, can fail for stochastic rounding. What, then, is the benefit of stochastic rounding? , for example), so the expected error is zero. Hence stochastic rounding maintains, in a statistical sense, some of the information that is discarded by a deterministic rounding scheme. This property leads to some important benefits, as we now explain.
, for example), so the expected error is zero. Hence stochastic rounding maintains, in a statistical sense, some of the information that is discarded by a deterministic rounding scheme. This property leads to some important benefits, as we now explain.![[0,1]](https://s0.wp.com/latex.php?latex=%5B0%2C1%5D&bg=ffffff&fg=222222&s=0&c=20201002) then clearly the partial sum can grow monotonically as more and more terms are accumulated until at some point all the remaining terms “drop off the end” of the computed sum and do not change it—the sum stagnates. This phenomenon was observed and analyzed by Huskey and Hartree as long ago as 1949 in solving differential equations on the ENIAC. Stochastic rounding avoids stagnation by rounding up rather than down some of the time. The next figure gives an example. Here,
then clearly the partial sum can grow monotonically as more and more terms are accumulated until at some point all the remaining terms “drop off the end” of the computed sum and do not change it—the sum stagnates. This phenomenon was observed and analyzed by Huskey and Hartree as long ago as 1949 in solving differential equations on the ENIAC. Stochastic rounding avoids stagnation by rounding up rather than down some of the time. The next figure gives an example. Here,  ), and the backward errors are plotted for increasing
), and the backward errors are plotted for increasing  , the errors for stochastic rounding (SR, in orange) are smaller than those for round to nearest (RTN, in blue), the latter quickly reaching 1.
, the errors for stochastic rounding (SR, in orange) are smaller than those for round to nearest (RTN, in blue), the latter quickly reaching 1.
 can be shown to hold with high probability. With round to nearest we have only the usual worst-case error bound, which is proportional to
can be shown to hold with high probability. With round to nearest we have only the usual worst-case error bound, which is proportional to  . In the figure above, the solid black line is the standard backward error bound
. In the figure above, the solid black line is the standard backward error bound  is the
is the  . For example,
. For example,![H_4 = \left[\begin{array}{@{\mskip 5mu}c*{3}{@{\mskip 15mu} c}@{\mskip 5mu}} 1 & \frac{1}{2} & \frac{1}{3} & \frac{1}{4} \\[6pt] \frac{1}{2} & \frac{1}{3} & \frac{1}{4} & \frac{1}{5}\\[6pt] \frac{1}{3} & \frac{1}{4} & \frac{1}{5} & \frac{1}{6}\\[6pt] \frac{1}{4} & \frac{1}{5} & \frac{1}{6} & \frac{1}{7}\\[6pt] \end{array}\right].](https://s0.wp.com/latex.php?latex=H_4+%3D+%5Cleft%5B%5Cbegin%7Barray%7D%7B%40%7B%5Cmskip+5mu%7Dc%2A%7B3%7D%7B%40%7B%5Cmskip+15mu%7D+c%7D%40%7B%5Cmskip+5mu%7D%7D+++++++++++++1+%26+%5Cfrac%7B1%7D%7B2%7D+%26+%5Cfrac%7B1%7D%7B3%7D++%26+%5Cfrac%7B1%7D%7B4%7D++%5C%5C%5B6pt%5D++++++++++++%5Cfrac%7B1%7D%7B2%7D+%26+%5Cfrac%7B1%7D%7B3%7D+++%26+%5Cfrac%7B1%7D%7B4%7D+++%26+%5Cfrac%7B1%7D%7B5%7D%5C%5C%5B6pt%5D++++++++++++%5Cfrac%7B1%7D%7B3%7D+%26+%5Cfrac%7B1%7D%7B4%7D+++%26++++++%5Cfrac%7B1%7D%7B5%7D+++%26+%5Cfrac%7B1%7D%7B6%7D%5C%5C%5B6pt%5D++++++++++++%5Cfrac%7B1%7D%7B4%7D+%26+%5Cfrac%7B1%7D%7B5%7D+++%26++++++%5Cfrac%7B1%7D%7B6%7D+++%26+%5Cfrac%7B1%7D%7B7%7D%5C%5C%5B6pt%5D++++++++++++%5Cend%7Barray%7D%5Cright%5D.+&bg=ffffff&fg=222222&s=0&c=20201002)
 . An underlying reason for the ill conditioning is that the Hilbert matrix is obtained when least squares polynomial approximation is done using the monomial basis, and this is known to be an ill-conditioned polynomial basis.
. An underlying reason for the ill conditioning is that the Hilbert matrix is obtained when least squares polynomial approximation is done using the monomial basis, and this is known to be an ill-conditioned polynomial basis.
![H_4^{-1} = \left[\begin{array}{rrrr} 16 & -120 & 240 & -140 \\ -120 & 1200 & -2700 & 1680 \\ 240 & -2700 & 6480 & -4200 \\ -140 & 1680 & -4200 & 2800 \\ \end{array}\right].](https://s0.wp.com/latex.php?latex=H_4%5E%7B-1%7D+%3D+++++%5Cleft%5B%5Cbegin%7Barray%7D%7Brrrr%7D++++++16+%26+-120+%26+240+%26+-140+%5C%5C++++++-120+%26+1200+%26+-2700+%26+1680+%5C%5C++++++240+%26+-2700+%26+6480+%26+-4200+%5C%5C++++++-140+%26+1680+%26+-4200+%26+2800+%5C%5C++++++%5Cend%7Barray%7D%5Cright%5D.+&bg=ffffff&fg=222222&s=0&c=20201002)

 is positive semidefinite for all nonnegative real numbers
is positive semidefinite for all nonnegative real numbers  .
. , which is a submatrix of
, which is a submatrix of  , the largest singular value tends to
, the largest singular value tends to  as
as  , with error decaying slowly as
, with error decaying slowly as  , as was shown by Taussky.
, as was shown by Taussky. ), mean that certain quantities associated with it can be calculated more accurately than for a general positive definite matrix. The third reason why the Hilbert matrix is not a good test matrix is that most of its elements cannot be stored exactly in floating-point arithmetic, so the matrix actually stored is a perturbation of
), mean that certain quantities associated with it can be calculated more accurately than for a general positive definite matrix. The third reason why the Hilbert matrix is not a good test matrix is that most of its elements cannot be stored exactly in floating-point arithmetic, so the matrix actually stored is a perturbation of  , but its elements are exactly representable in double precision only for
, but its elements are exactly representable in double precision only for  .
.