The matrix inverse is defined only for square nonsingular matrices. A generalized inverse is an extension of the concept of inverse that applies to square singular matrices and rectangular matrices. There are many definitions of generalized inverses, all of which reduce to the usual inverse when the matrix is square and nonsingular.
A large class of generalized inverses of an 




Here, the superscript 
Condition (1) implies that if 




A (1,3) inverse can be shown to provide a least squares solution to an inconsistent linear system. A (1,4) inverse can be shown to provide the minimum 2-norm solution of a consistent linear system (where the 2-norm is defined by 
There is not a unique matrix satisfying any one, two, or three of the Moore–Penrose conditions. But there is a unique matrix satisfying all four of the conditions, and it is called the Moore-Penrose pseudoinverse, denoted by 



The pseudoinverse can be expressed in terms of the singular value decomposition (SVD). If 








In MATLAB, the function pinv computes 

For square matrices, the Drazin inverse is the unique matrix 

where 


If 



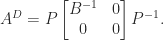
The Drazin inverse can be represented explicitly as follows. If
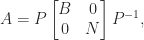
where 


Here is the pseudoinverse and the Drazin inverse for a particular matrix with index 
![A = \left[\begin{array}{rrr} 1 & -1 & -1\\[3pt] 0 & 0 & -1\\[3pt] 0 & 0 & 0 \end{array}\right], \quad A^+ = \left[\begin{array}{rrr} \frac{1}{2} & -\frac{1}{2} & 0\\[3pt] -\frac{1}{2} & \frac{1}{2} & 0\\[3pt] 0 & -1 & 0 \end{array}\right], \quad A^D = \left[\begin{array}{rrr} 1 & -1 & 0\\[3pt] 0 & 0 & 0\\[3pt] 0 & 0 & 0 \end{array}\right].](https://s0.wp.com/latex.php?latex=A+%3D+%5Cleft%5B%5Cbegin%7Barray%7D%7Brrr%7D+1+%26+-1+%26+-1%5C%5C%5B3pt%5D+0+%26+0+%26+-1%5C%5C%5B3pt%5D+0+%26+0+%26+0+%5Cend%7Barray%7D%5Cright%5D%2C+%5Cquad+A%5E%2B+%3D+%5Cleft%5B%5Cbegin%7Barray%7D%7Brrr%7D+%5Cfrac%7B1%7D%7B2%7D+%26+-%5Cfrac%7B1%7D%7B2%7D+%26+0%5C%5C%5B3pt%5D+-%5Cfrac%7B1%7D%7B2%7D+%26+%5Cfrac%7B1%7D%7B2%7D+%26+0%5C%5C%5B3pt%5D+0+%26+-1+%26+0+%5Cend%7Barray%7D%5Cright%5D%2C+%5Cquad+A%5ED+%3D+%5Cleft%5B%5Cbegin%7Barray%7D%7Brrr%7D+1+%26+-1+%26+0%5C%5C%5B3pt%5D+0+%26+0+%26+0%5C%5C%5B3pt%5D+0+%26+0+%26+0+%5Cend%7Barray%7D%5Cright%5D.+&bg=ffffff&fg=222222&s=0&c=20201002)
Applications
The Moore–Penrose pseudoinverse is intimately connected with orthogonality, whereas the Drazin inverse has spectral properties related to those of the original matrix. The pseudoinverse occurs in all kinds of least squares problems. Applications of the Drazin inverse include population modelling, Markov chains, and singular systems of linear differential equations. It is not usually necessary to compute generalized inverses, but they are valuable theoretical tools.
References
This is a minimal set of references, which contain further useful references within.
- Adi Ben-Israel, The Moore of the Moore–Penrose Inverse, Electron. J. Linear Algebra 9, 150–157, 2002.
- Adi Ben-Israel and Thomas N. E. Greville, Generalized Inverses: Theory and Applications, second edition, Springer-Verlag, New York, 2003
- Stephen Campbell and Carl Meyer, Generalized Inverses of Linear Transformations, Society for Industrial and Applied Mathematics, Philadelphia, PA, USA, 2009. published (Originally published by Pitman in 1979.)
- Stephen J. Kirkland and Michael Neumann, Group Inverses and
-Matrices and their Applications, Chapman and Hall/CRC, 2013
- Guorong Wang, Yimin Wei and Sanzheng Qiao, Generalized Inverses: Theory and Computations, second edition, Springer-Verlag, Singapore, 2018.
Related Blog Posts
- What is a Matrix? (2020)
This article is part of the “What Is” series, available from https://nhigham.com/category/what-is and in PDF form from the GitHub repository https://github.com/higham/what-is.
 rows and
rows and  columns and
columns and 
 for all
for all  and
and  , where
, where  denotes the entry at the intersection of row
denotes the entry at the intersection of row  matrix
matrix  matrix
matrix  matrix
matrix  defined by the formula
defined by the formula
 , both
, both  and
and  are defined, but they are generally unequal: matrix multiplication is not commutative.
are defined, but they are generally unequal: matrix multiplication is not commutative. , where
, where  is the identity matrix, which has ones on the main diagonal (that is, in the
is the identity matrix, which has ones on the main diagonal (that is, in the  position for all
position for all  , is the
, is the  matrix whose
matrix whose  entry is
entry is  . For a complex matrix, the conjugate transpose, written
. For a complex matrix, the conjugate transpose, written  or
or  , has
, has  .
. , row vectors are
, row vectors are  , and scalars are
, and scalars are  .
. from
from  to
to  to
to  , the backward error in
, the backward error in  such that
such that  , for some appropriate measure of size. There can be many
, for some appropriate measure of size. There can be many 

 of two vectors the backward error of an approximation
of two vectors the backward error of an approximation  can be defined as
can be defined as
 . It can be shown that
. It can be shown that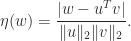
 is clearly unsymmetric in that
is clearly unsymmetric in that  is perturbed but
is perturbed but  is not. If
is not. If  and
and  and no explicit formula is available for
and no explicit formula is available for  of two
of two  is unlikely to be of rank 1, so
is unlikely to be of rank 1, so  is not in general possible for any
is not in general possible for any  is bounded in terms of the backward error
is bounded in terms of the backward error  by
by

 . More correctly, this is the condition number with respect to inversion, because a relative change to
. More correctly, this is the condition number with respect to inversion, because a relative change to  can change
can change  by a relative amount as much as, but no more than, about
by a relative amount as much as, but no more than, about  for small
for small  is also the condition number for a linear system
is also the condition number for a linear system  are the data).
are the data). for any norm for which
for any norm for which  (most common norms, but not the Frobenius norm, have this property) and that
(most common norms, but not the Frobenius norm, have this property) and that 

 , with approximate equality for some
, with approximate equality for some  can be given in terms of the Jacobian matrix,
can be given in terms of the Jacobian matrix,  :
:
 , so
, so  . Hence, for example,
. Hence, for example,  .
. is a simple (non-repeated) root of the polynomial
is a simple (non-repeated) root of the polynomial  then the data is the vector of coefficients
then the data is the vector of coefficients ![a = [a_n,\dots,a_0]^T](https://s0.wp.com/latex.php?latex=a+%3D+%5Ba_n%2C%5Cdots%2Ca_0%5D%5ET&bg=ffffff&fg=222222&s=0&c=20201002) . It can be shown that the condition number of the root
. It can be shown that the condition number of the root  -norm,
-norm,

 produce small changes in
produce small changes in 
 and
and  illustrates).
illustrates).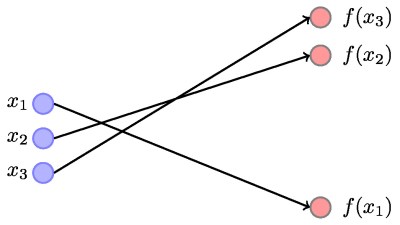
 .
. ) of the posts available on GitHub in the repository
) of the posts available on GitHub in the repository 